If I understand it correctly, Aruplane only has stall prevention systems and no active stall recovery systems.
So what happened here?
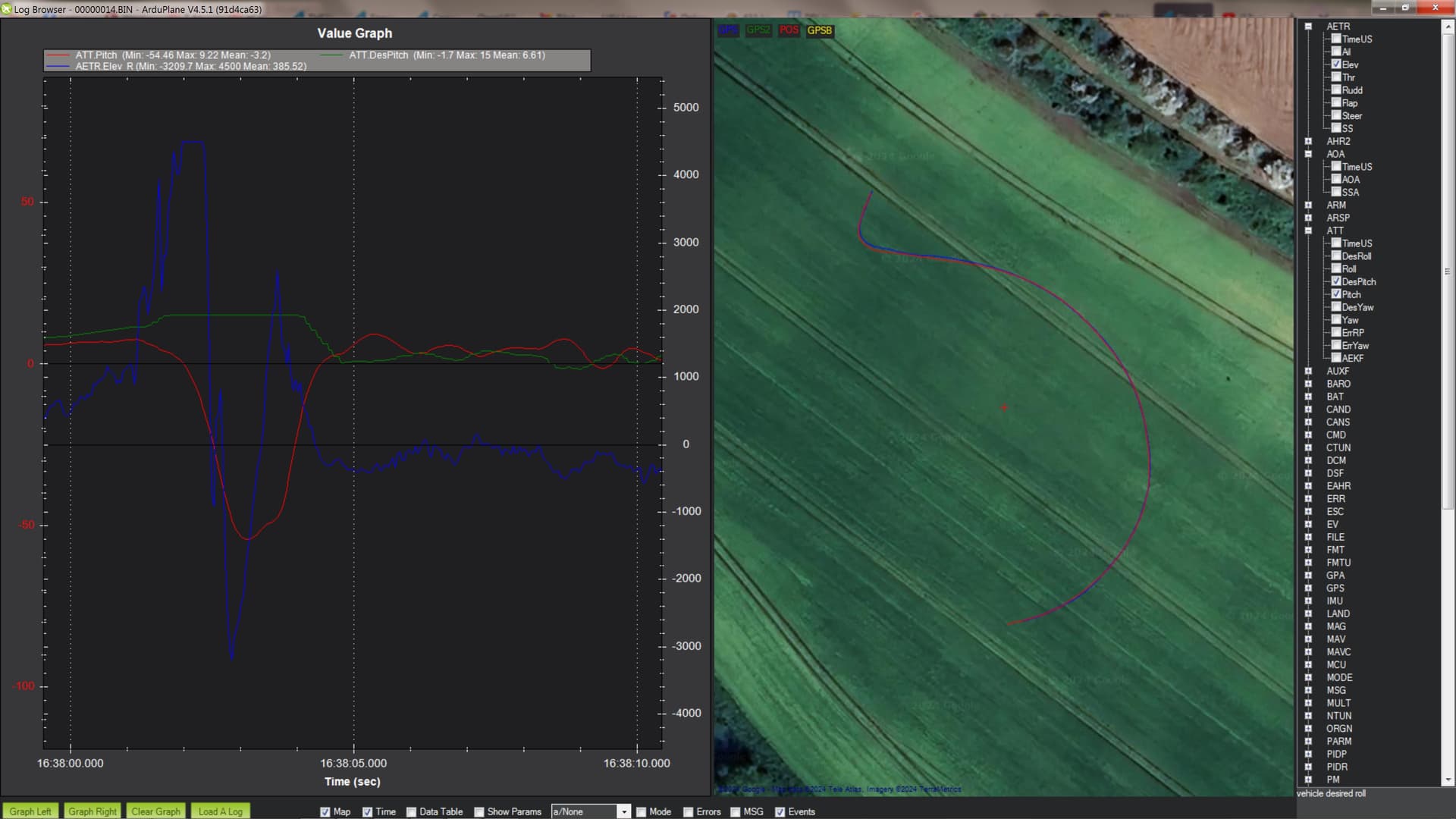
I was gathering data in auto mission and logging airspeed vs watts. I reduced airspeed (by mavlink telemetry) and got to 11m/s. The air got a little turbulent and a wing stalled and entered a half spin.
It almost looks like arduplane first tried to keep the nose up with elevator and then detected a stall and put down elevator. If that’s not the case, why did it reverse the elevator (blue line)? Perhaps the TEC system. There seems to be a lot going on with TEC2 at that point.
file ‘stall at 1638’
2 Likes