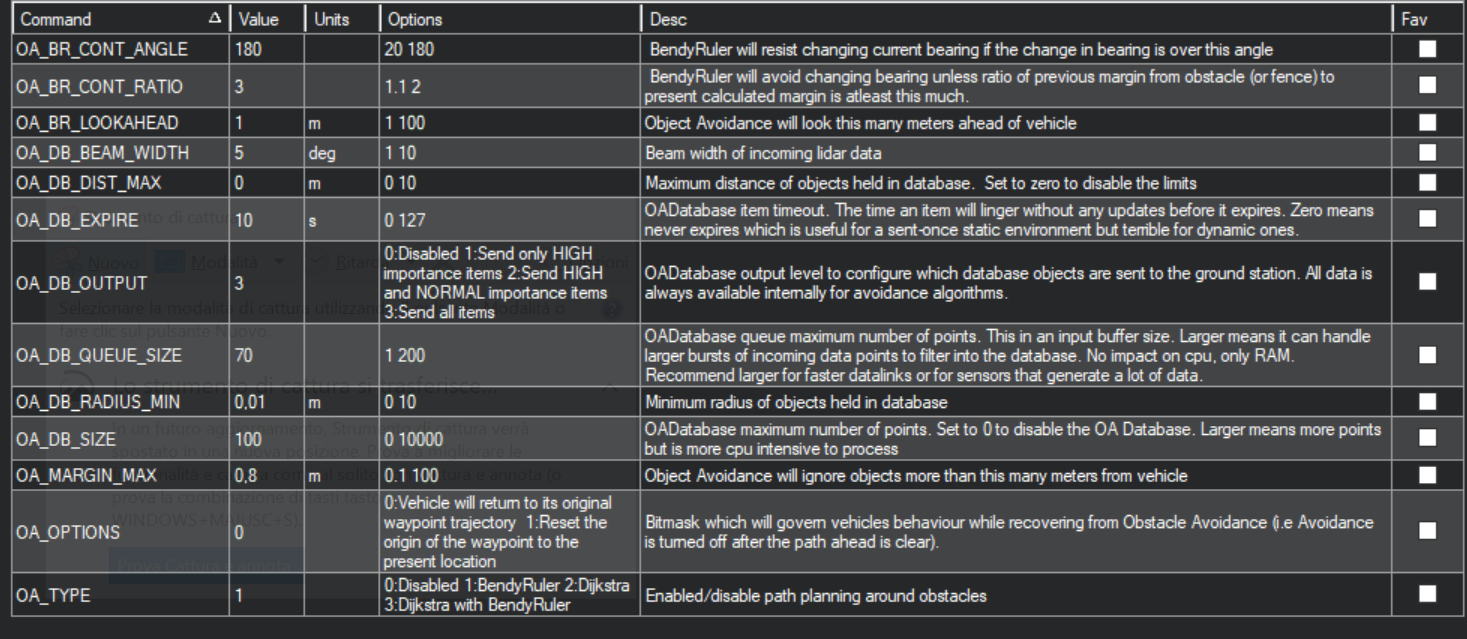
These are my OA parameters with only one TF luna lidar in the front position (FW 4.2). I did some bendy ruler tests yesterday and the rover is very (too) hesitant. He stops long before deciding which way to go, how can I improve?
Thank you
2 Likes
you should make a video or post a log so we can see exactly what behaviour your getting.
1 Like
Hi @geofrancis many thanks!
Here the last log
Omnibus F4 custom fw (custom fw server ) 4.2.1 (beta). GPS BN880q
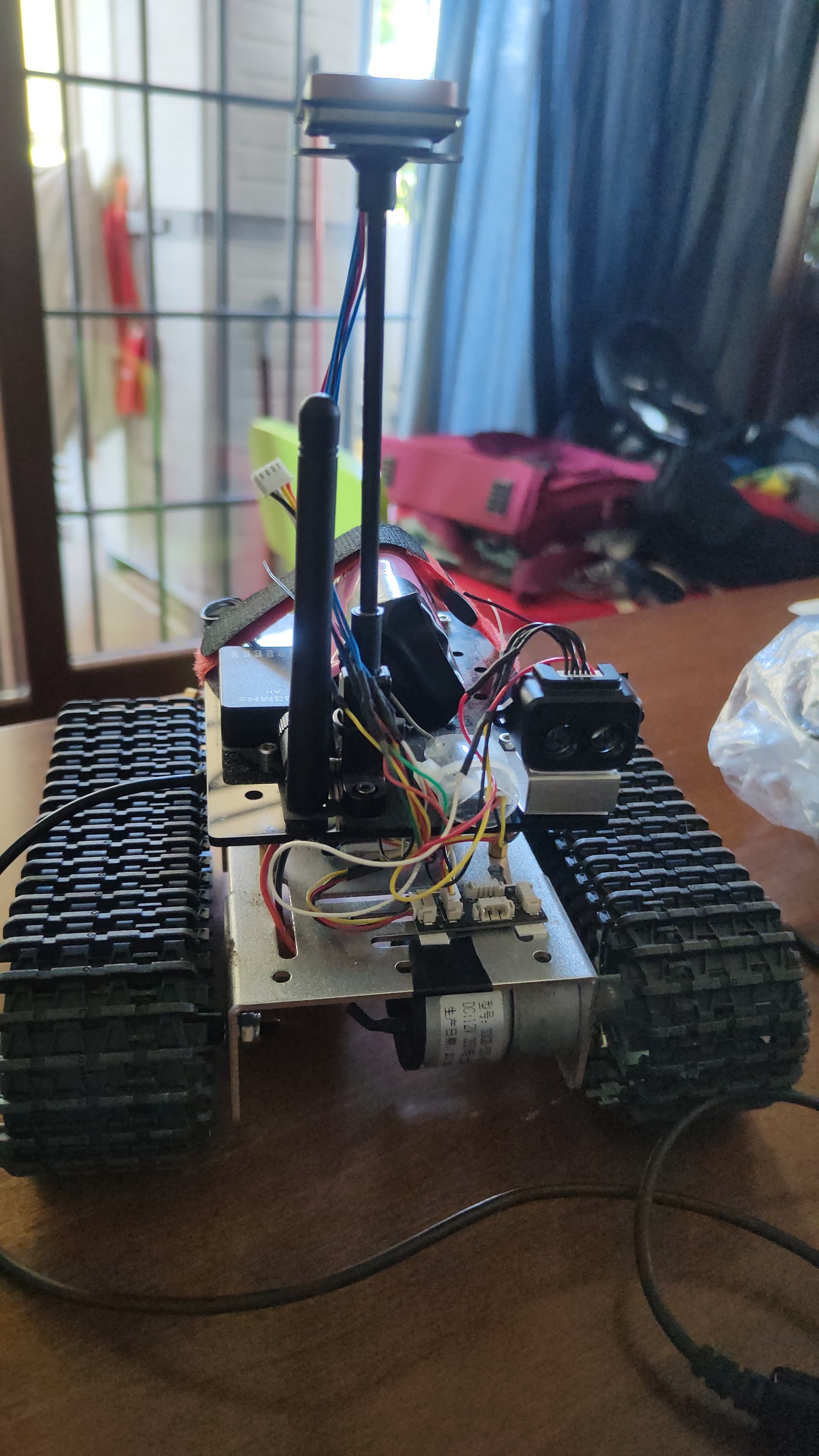
I dont see anything wrong with it, it takes time for it to scan around and figure out a clear path when you only have a single forward rangefinder as it has to rotate the vehicle to scan rather than being always able to see in every direction.
1 Like
OK thanks. @geofrancis
Do you think it is possible to act on the parameters that I have reported in this thread to make the scan less accurate but a little faster? I have a second TF LUNA LIDAR, can I add it to improve the functioning? How to place it on the rover?
Im not sure i have only started experimenting with avoidance on rover. Im Just about to fit a tfmini plus so il be able to help more soon.
1 Like
Try a Poor mans scanning system with a TF Luna and a servo. There is at least one thread on the forum here doing that with a TF Mini.
Then you need a sine function to drive the servo at a cycle rate dependent on vehicle speed ![]()
1 Like
I’m about to re-embark on trying to figure out how to have two TF-Minis - I want to run them I2C, which one is fine, but to run two you need to change the address of the second unit and while I dabbled with it a while ago I was unsuccessful at that time.
I can’t help you with your problem but could you please tell me where you got your chassis and tracks? That is awesome!
From AliExpress!
€ 30,23 5%di SCONTO | 2018 di Nuovo Disegno mini TP101 Intelligente Serbatoio Chassis Telaio Cingolato Piattaforma di Controllo A Distanza con Doppio Motore di CC per il FAI DA TE Arduino