Hi all,
This is my first post, so please excuse me if I do not provide enough info.
I’m building a coaxcopter from scratch and started testing it by suspending it from the ceiling and running it in althold mode. When it starts increasing altitude, it increasingly oscillates and becomes unstable, as shown in the image below:
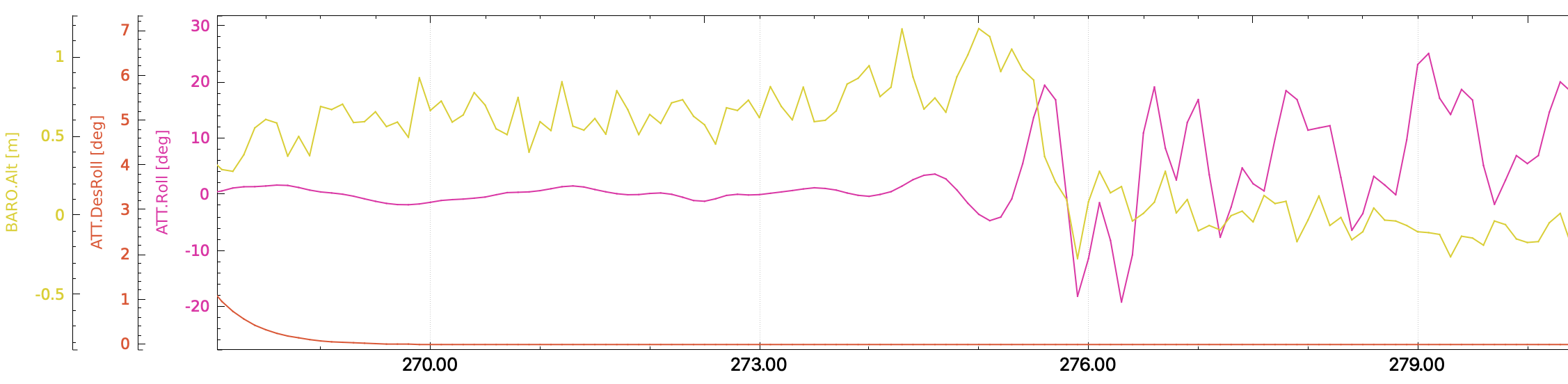
This happens on both roll and pitch. I checked VibeX/Y/Z and they seem ok.
I think that this is an issue with either the control fins being too over/underpowered or the PIDs for roll/pitch being too high, but experimenting with these doesn’t seem to help much.
Could y’all suggest what I should look at? Here’s also a full log file:
log_177_UnknownDate.bin.zip (719.1 KB)
Thank you!