After successfully building a 3.5 inch quad, I tried to follow the @amilcarlucas 's wonderful How to methodically tune any ArduCopter | MethodicConfigurator methodology to build an indoor cinequad which is almost the same build as the 3 inch quad in the Methodic Configurator example. I did make some judgement calls in applying the parameters as an intermediate NOOB
I am getting very hot motors during the first hovers. The prop nuts were flying off as well I have not much experience with these prop nuts, so was not sure how much torque should be applied for tightening. The vibrations are really really, but I do hear high squeal. Again, I am not sure if 8-blade have a higher frequency noise when in flight.
I am hoping not just to resolve the issue of hot motors in this blog, but also hoping that this issue would serve as a learning opportunity for those who are at an enthusiast and intermediate NOOB level .
The first thing someone may look at is the Rcout’s and you are not logging them. Attitude is not logged either. And to review the Notch filter you need to enable Batch loging on an IMU.
Either there is a bug in the logging parameter settings on the configurator template, or you did not follow the procedure correctly and skipped some steps.
I would like to know what was it. So that I can fix it if necessary
There is no oscillation on the outputs but the Rate PID values look a bit high for a 3.5" craft with that thrust/weight. Notch filter looks OK but you don’t need the 2nd harmonic.
Thanks so much for the prompt responses and apologies for my delayed responses.
@amilcarlucas - You are absolutely right, I missed steps and I plan to do them step by step again. And I will post them as I do them gradually @dkemxr - Thanks for the feedback.
First things first. I was concerned about the screeching noise of the propellers on throttle up and down. Upon closer inspection I found that the hubs of the props were not high enough to be tightly screwed in by the prop nut. Therefore the motors were spinning faster to provide the required thrust, which significantly increased the temperature of the motors with only a 20-30 second hover. I changed the nuts that came with the motors with some old sunny sky motors and voila!, temperature is lower and the prop nuts are not flying off any more. The motors are still hotter than my other 3.5 inch quad. For my 3.5 inch quad, the motors are cool to touch even after a long flight.
As @dkemxr pointed out, the PIDs are high. I may have prematurely applied the PID from step 16 of the configurator, sorry about that.
Next steps:
Proper Logging
Changed logging per below
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPTION,4
Mission Planner should only be used in step 12. Changing parameters out of sequence will get you into trouble. If you had used it correctly you would not be having this problem in the first place.
@amilcarlucas - Completely agree. Thanks for empowering me to be more deliberate. The result of your empowerment led me on quite a journey, thanks again!
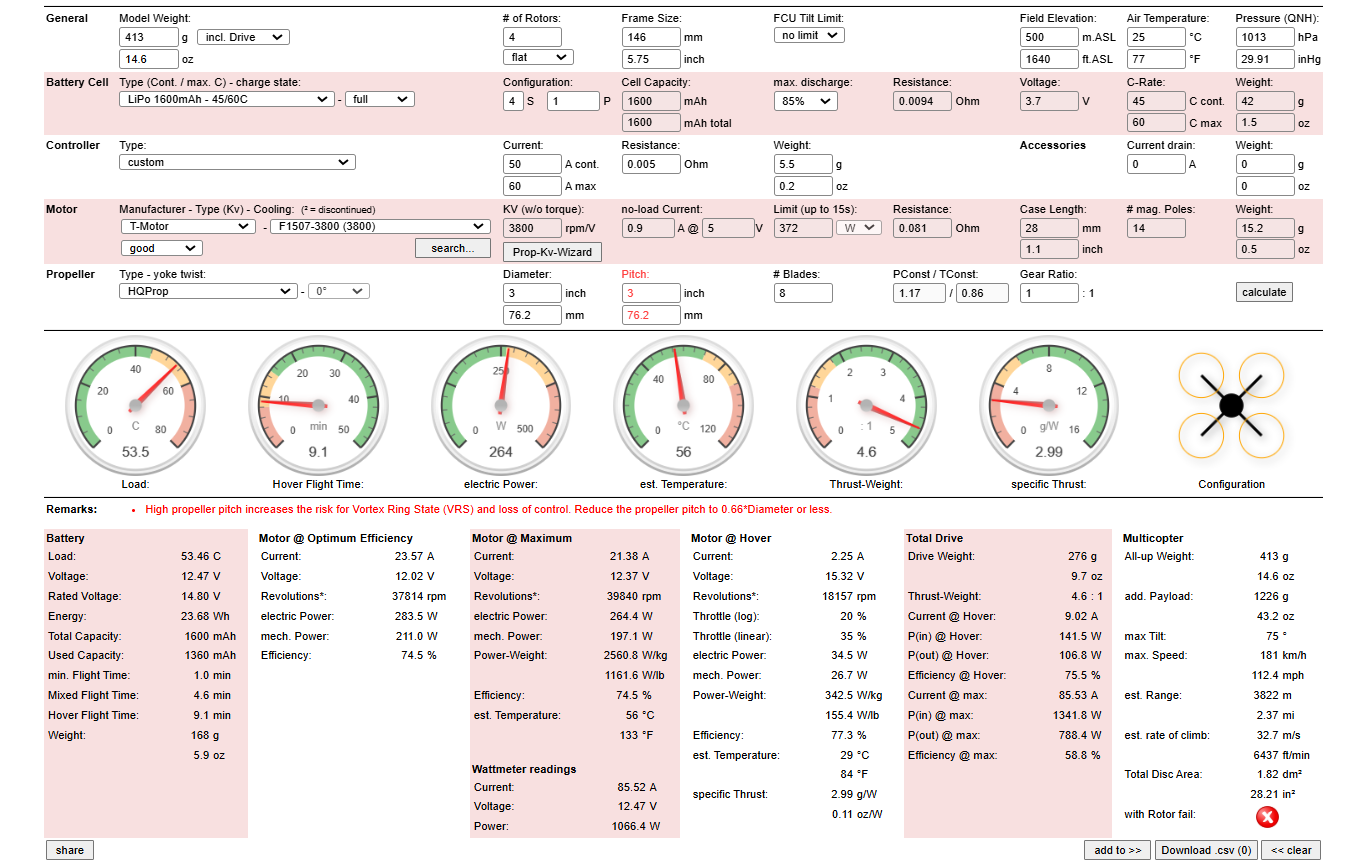
Could the answer here be in Step 1, where eCalc is subscribing " |* High propeller pitch increases the risk for Vortex Ring State (VRS) and loss of control. Reduce the propeller pitch to 0.66*Diameter or less.|"?
It does make sense to my neophyte mind. Below are the reasons for this answer?
After 30-40 seconds of hover, the quad revs up, possibly compensating for the VRS?
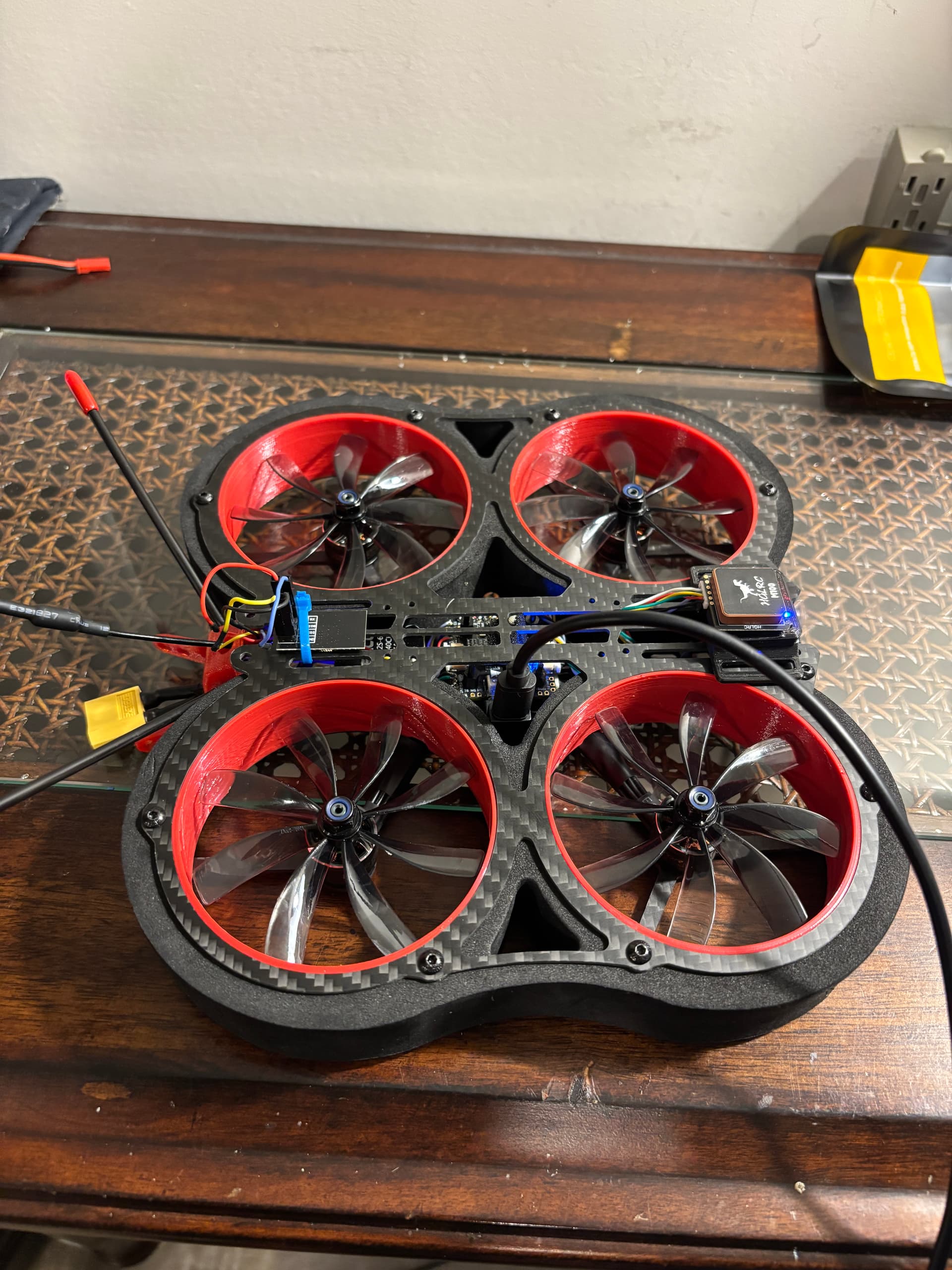
Here are the details of my rig in PDF format showing the components and their weights Cineboy_Weight.pdf (88.5 KB)
So would the solution be new props as @amilcarlucas your eCalc results shows that the props you used were 3 inch with 1.8 pitch and 3 blades? They are not the same as you have in your build table on this page. Would you mind sharing where you got those props. Would those props fit the T-motor f-1507 that you used in your rig as I have the same motors which have an M5 shaft I believe.
We used the HQProp Duct-76MMX8 in the end, they are suitable for the t-motor f-1507. They are also 3" pitch and our Taycan flew/flies fine. They look like yours and have the same stats as in your eCalc screenshot.
I don’t thing VRS is a big problem when you have 8 blades AND a duct and it will be even less of a problem as soon as you stop hovering and fly forward.
Edit: now that I think about it, you may not necessarily get vortex rings, but flow separation is real and does indeed mean that the motors have to work harder for the needed amount of lift. Still, you’ll see less flow separation once the quads moves through air.
I probably still have an eCalc screenshot with our final config that I can share as soon as I find it.
Btw in your first post you said 3.5" quad, is it 3" or 3.5"?
If flow separation is indeed the factor for the motors to work harder to provide the required lift for the hover, then I should test that by decreasing hover time and doing light roll/pitch and Yaw maneuvers and seeing that motors are not revving up, right?
This rig is a 3 inch one which I am building for indoor flying for long winters in Canada . My 3.5 inch one built earlier flies like a dream.
I guess no quick answers
So in my current flight log, Z vibration reach a max of 15.42, where X and Y are much lower. Also Rate Out shows Y being way out of range. I believe rate values should be less than .1, am I correct?
In conclusion, my eCalc is good and very comparable to your 3 inch quad. I will move on to the next steps. I will also test whether maneuvering beyond hover lowers Z vibrations. The motors are still hot compared to my 3.5 quad.
Is it a good time to share my parameters? Thanks once again.
That gives you temperature if the ESC provides ESC temperature. For Motor temperature you need a sensor at each motor or you use a cheap contactless Thermometer pistol that you can get at any general store.
My ESC does provide temp/rpm and current telemetry. As @Janno had pointed out, maneuvering does make a significant difference in Motor temperature. It does not go over 51C for a short pitch/roll maneuver and the motors are cooler to touch, a WIN!!
Here is the link to the flight showing temp/rev parameters as while doing some roll/pitch maneuvers. Flight_temp.mp4.
I forgot to make video of a hover (work call, dang), but as I the quad was hovering, I took a quick loot at the HUD and never saw the temp going over 50 - 55C. I guess I was comparing this quad to my 3.5 inch which runs a lot cooler.