The objective is to build an autonomous gravity racer (no motors, just rolling down a hill) to go through several waypoints. Autonomy through GPS and magnetometer.
Was wondering if anyone can direct me a little in terms of how the coding to control the brakes for steering around corners, using an actuator, can be implemented.
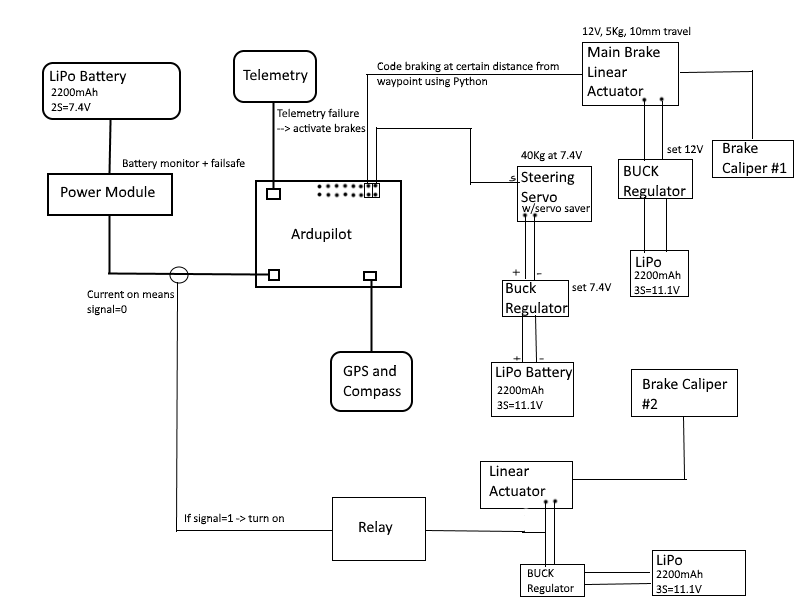
Also, if how the servo and actuators are connected in the attached planned schematic is appropriate.
Thank you in advance 