You’re correct. 760 is center, travel is 400 to 1120. It needs to be set to 760, pull the servo horn off and center it as close as possible, then adjust from there.
Will try that again
I am sure I run through that for few days and lowest value than 850 will make the servo responding not even on both direction with speed up in one and slow down in another direction
Will double check it tonight
Thank you guys
OK, I looked up the specs on that servo. It is a narrow-band servo with 300us per side, 460 to 1020, centered at 760us. They did this for these super-fast servos to reduce the pulse width to get higher refresh rates. Some of them run up to 560Hz. The one you got is 333.
Ozzy,
So the reason the actual attitude is not following the actual is due to the code is leaking the Integrator off but no lower than the ILMI value. The code is designed to leak the integrator for speeds less than 5 m/s. You can think of the integrator as a barrel. when we are faster than 5 m/s, the barrel is allowed to fill all the way to the top and it can’t hold anymore so it is limited. When the aircraft goes less than 5 m/s, the barrel has a pretty big hole in it at a lower level and that hole is opened. So the integrator leaks out at that level and can’t fill any more unless it builds faster than what is being leaked off.
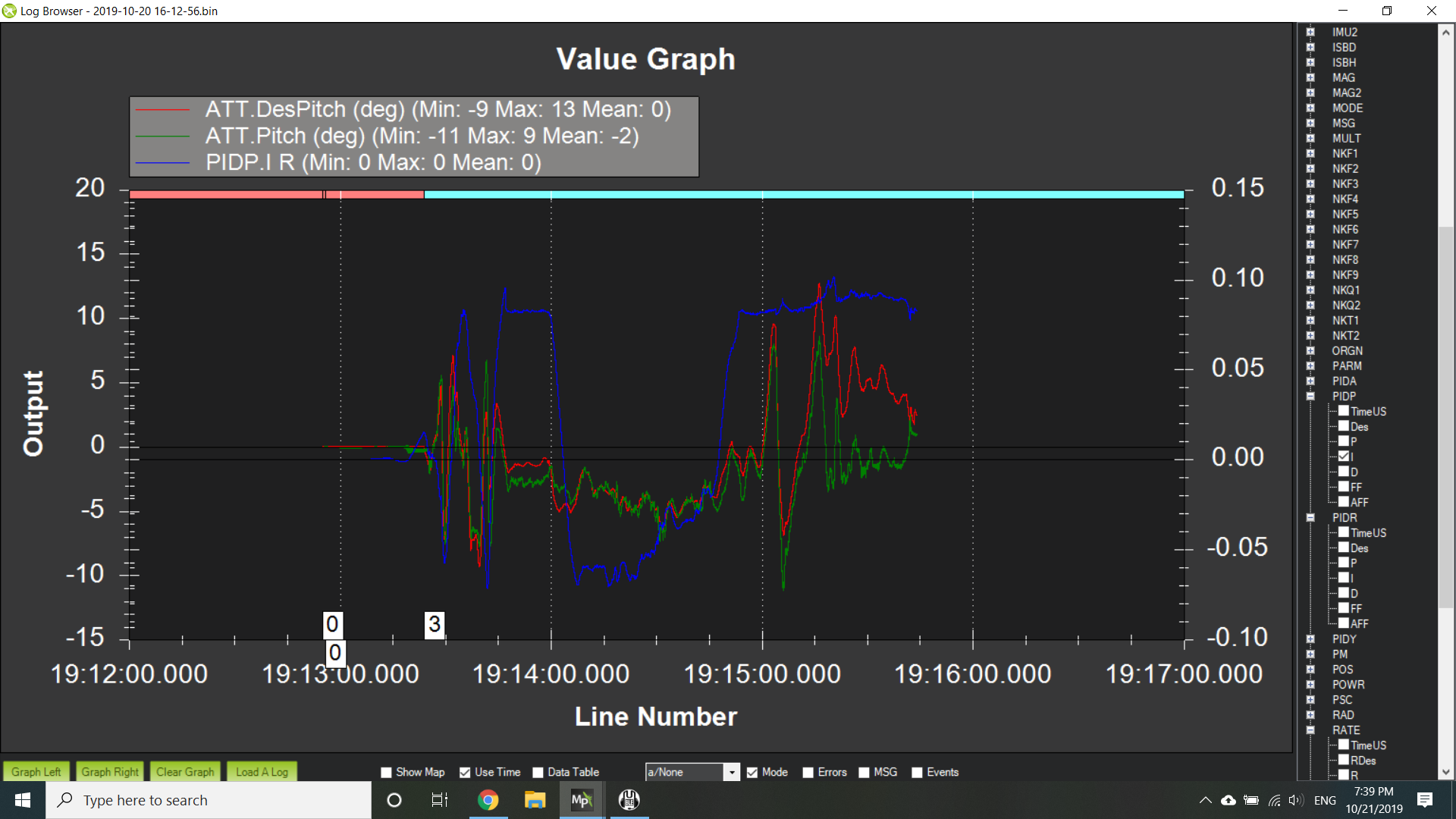
So in the plot I show the PIDP.I (pitch integrator) and the pitch desired attitude and actual attitude. You can see that when the integrator gets flat at the top of the plot, the pitch desired and actual values start diverging. So I guess you have a couple of choices
- don’t fly at speeds around 5 m/s. Fly at 6 m/s instead or faster. That way the aircraft goes out of dynamic flight and you get a larger integrator limit.
- Try increasing the RAT_PIT_I or RAT_RLL_I to see if the integrator can grow more if needed but will leak off
- increase the ILMI parameter. Generally we don’t like to increase this beyond 0.1 because of an increased chance of roll over on the ground. This is more likely with acro.
Hopefully this helps. Otherwise the flight looked pretty good.
Thank you very much for the explanation, I will increase the speed to 7 and try it out
Also will increase the RAT_PIT_I and check the logs
Just wanted to ask please if you can tell me how to set the battery monitor
It’s just better to have telemetry with flight info in case if I over run the batteries
I have 6s 5000mah and I use also 6s 8000 mah
For the motor
And I use 2s 4000 mah for the servos and tphe FC
I am using BEC 10A for the 2s
And castel creation for the 6s
Thank you for all the help !
I appreciate it!
Ozzy
Here is the link to the battery monitor wiki. Personally, I have a CUAV high voltage power module but I have not been successful in getting it to work but also haven’t spent much time trying to do so. I basically use flight time to judge battery status and check the battery with a voltmeter post-flight to ensure I didn’t drop the battery below the minimum safe voltage. Flight time has worked pretty well for me but I don’t perform extensive missions. Mostly short test flights.