On 5th Flight Holybro Durandal Hexacopter ZD850 Crashed.
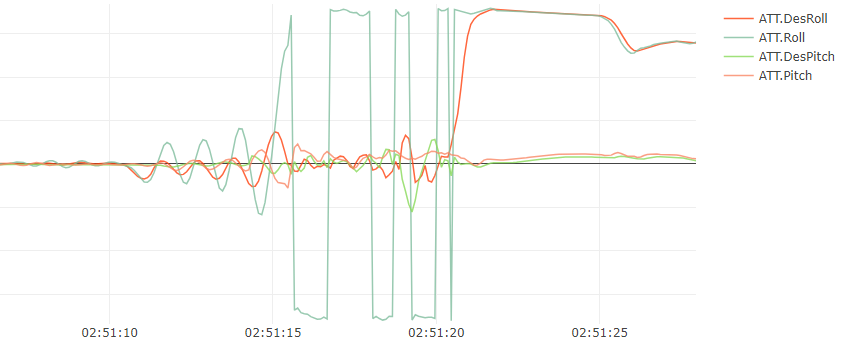
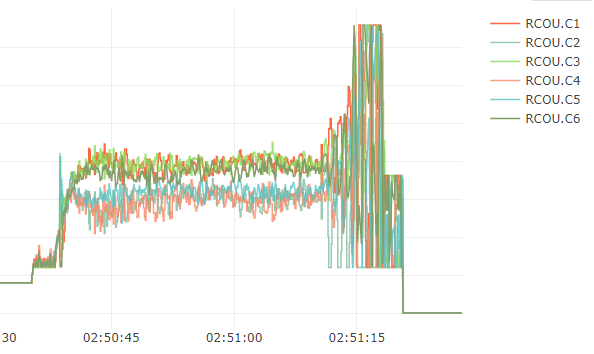
Flying this build for the first time on loiter mode, and after flying for 2 to 3 minutes in GPS Loiter mode. When I move my transmitter Stick to extreme left to move the Hexa to the left then the Frame enter a movement like Pendulam.
Holybro Durandal Hexacopter ZD850 Crashed.
Can anybody tell what went wrong ???
Seems to be GPS gliltch.
But after that Crash I build another quad on this Durandal FC but still it cannot fly on Loiter mode as well
https://drive.google.com/file/d/14cbbpLJNA6__zdm5RNpaPbaovKkbSEz7/view?usp=sharing,%20https://drive.google.com/file/d/152xugn5oDscDVrZEz9qPuIK_E8wkn1yg/view?usp=sharing,%20https://drive.google.com/file/d/17HgjqZBCb76Ldd3sLoaQk42bZfXU59mB/view?usp=sharing,%20https://drive.google.com/file/d/17Ikw9RZ9MjRE6f_ytFMhCbHM60xuW8oZ/view?usp=sharing,%20https://drive.google.com/file/d/1J4ckz83hMWiDRfj4nOkOFDOo52xASEEh/view?usp=sharing,%20https://drive.google.com/file/d/1JdhKFdq2xAnXcspVslCAvT_bE6V9jmOf/view?usp=sharing,%20https://drive.google.com/file/d/1NrWiLlt0Nvkomuxqhpt9SYn3-QOOs2es/view?usp=sharing,%20https://drive.google.com/file/d/1QggskX9B9gji7r9SIZMKZvwRvL420VPv/view?usp=sharing,%20https://drive.google.com/file/d/1RWt3VJeldIp4hmyYR7DiJFV9vuBxbf4D/view?usp=sharing,%20https://drive.google.com/file/d/1b0MfF6nwFHrOWvA-IGyEQ_X_3VA_4ucb/view?usp=sharing,%20https://drive.google.com/file/d/1kPk9q3tMLPUCzwWY-W2Q48O9lLuMq1vb/view?usp=sharing,%20https://drive.google.com/file/d/1kekswUrHvkY8uhHCEpH1PYv7QoKqrtNb/view?usp=sharing,%20https://drive.google.com/file/d/1xMMOQ9qkHlQlS3XF5TNXdF_BKR_ER74w/view?usp=sharing
https://drive.google.com/file/d/1MH8ZA1cTR1AhVHSPywYm4GLxqeCWieP1/view?usp=sharing