Hello, I have another problem with my quadcopter, this time landing! It performs well in flight, but when it comes to landing, I’m not very satisfied with the result, especially in windy conditions! It oscillates back and forth like if I was pushing the pitch back and forth suddenly. It only happens when in GPS modes like loiter, RTL or Land!
I don’t have logs, but rather a video demonstrating the issue!
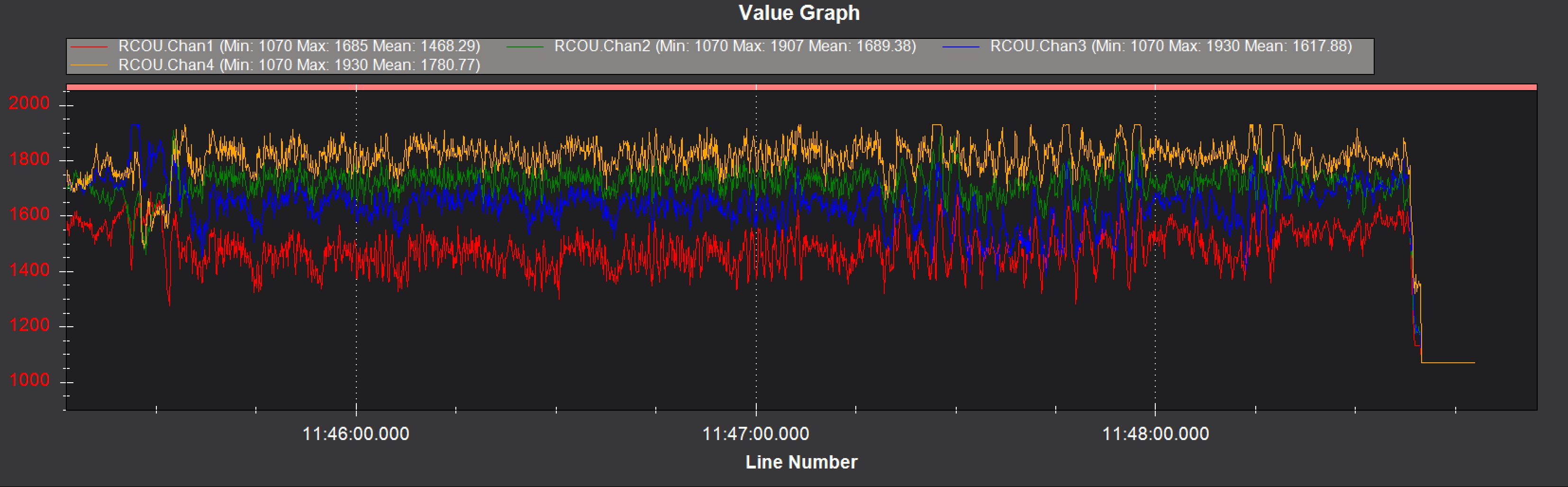
As expected this craft is underpowered with one motor bouncing off of command max. No amount of tuning will put lipstick on this pig. If you are going to post more logs turn on more options. A bitmask value of 30686 would be good.
No. That craft has fundamental problems that should be addressed. I’m not sure why you are posting about this. My recommendations:
Rebuild so thrust/weight is inline with standard practice.
Replace the Flight Controller.
Signing off for tech support of APM Flight Controllers. Perhaps others will pick it up. Good luck.