Yesterday I have finished real world test flights of my copter, and so far I feel I am on the right track, so it may be now time to give some details about the built if someone would want to replicate this copter.
What follows is data which was tested in real world flights in the mountains (more than 25 flights, over 7 days, total flight time 14 hours, at altitudes of 2000 … 6500 m).
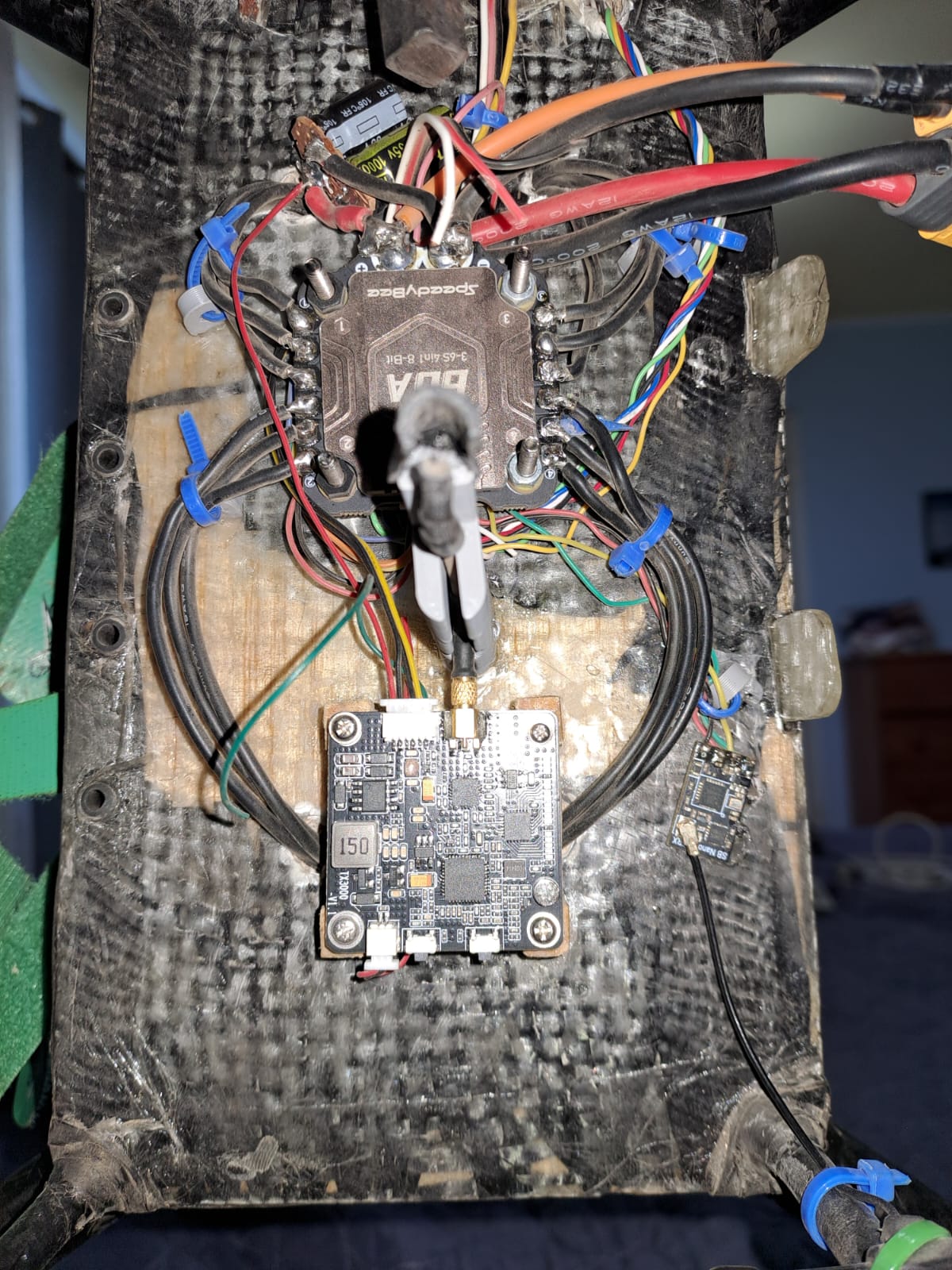
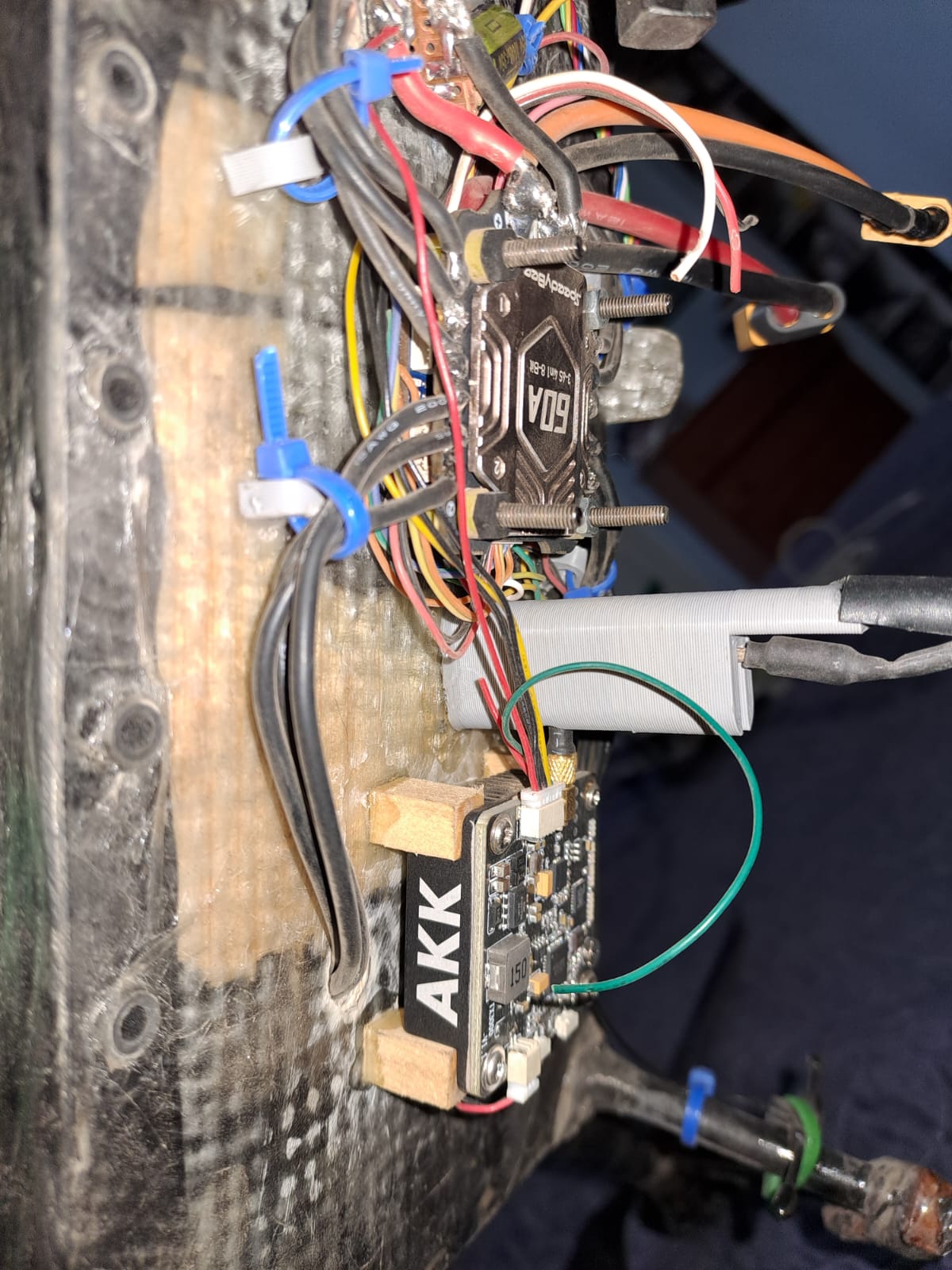
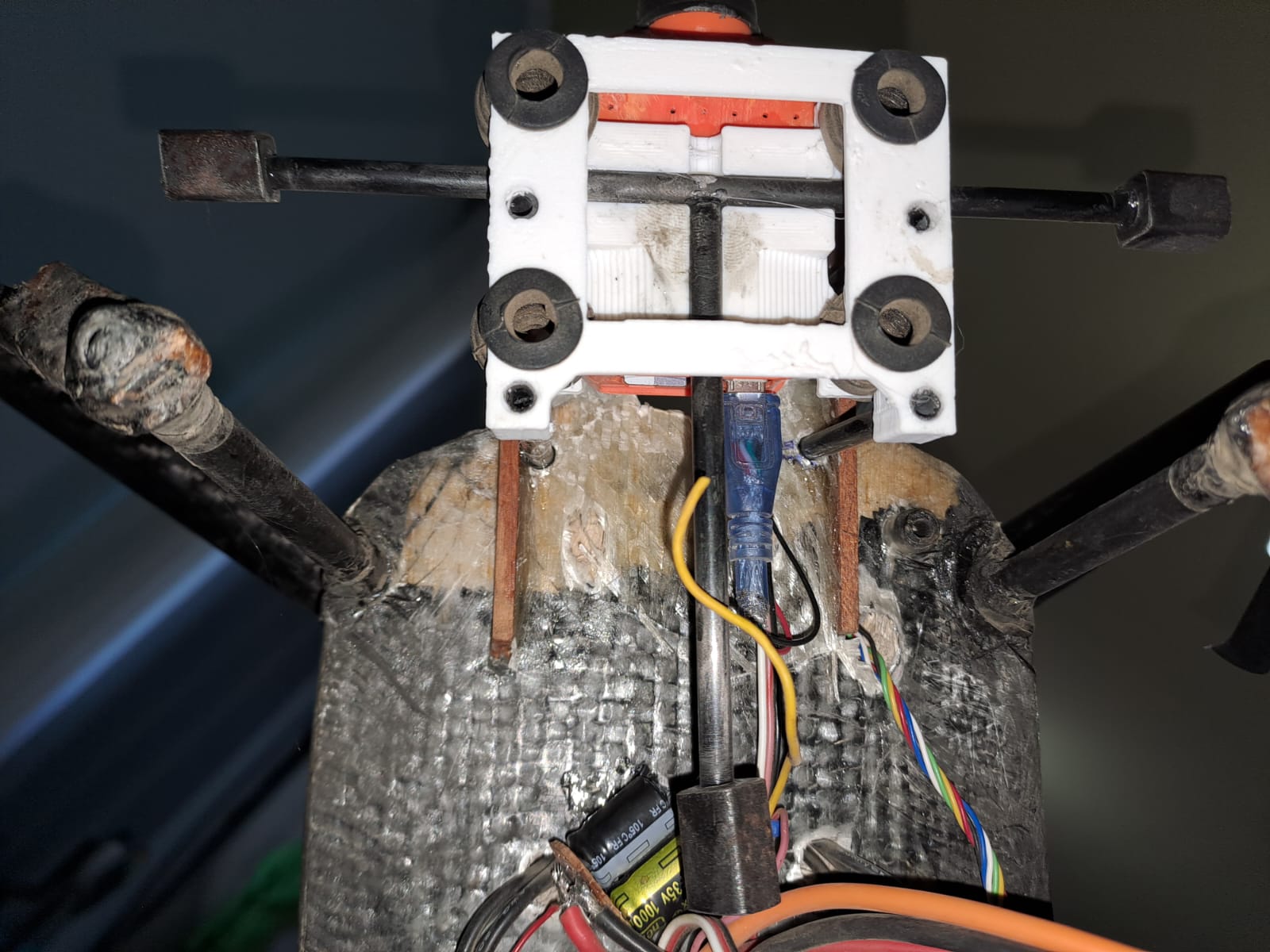
I will provide complete info about “as built” and then will make some suggestions for improving (I am working on the next version already).
Legal Disclaimer: Where I fly, the highest mountain is close to 6900 meters, I fly no higher than 120 meters above ground, so legally I can fly to 7020 meters, and if it feels that the copter is higher than 120 meters above the ground, that is an optical illusion…
Objective: Design and build High Altitude Medium Range Copter for flying in mountains in adverse meteorological conditions with limited payload capacity for filming.