Hello there,
I’m flying an Aurelia X6 Standard with the Copter-4.5.2 firmware.
The drone behaves normally with the stock hardware as shown in this log file.
I do get the following message, but from what i could read about it, it seems to be a harmless behavior.
EKF3 IMUX MAG0 in-flight yaw alignment complete
Also, MAG1 seems to be greatly affected by the motors’ noise, but it doesn’t seem to affect the drone’s behavior.

I’m trying to remove the stock landing gear and add prop protectors, but I get very strange behaviors when i do so, as shown in this log file.
The prop protectors weigh about 200g each for a total of 1200g, which is well below the drone’s payload limit of 5000g. From what I can tell, they have 2 main effects on the drone: they increase its inertia, and they guide the prop’s flow straight down like a fixed rudder. I know that the yaw is not tuned properly for the added inertia, but I can’t explain the observed behaviors with this alone.
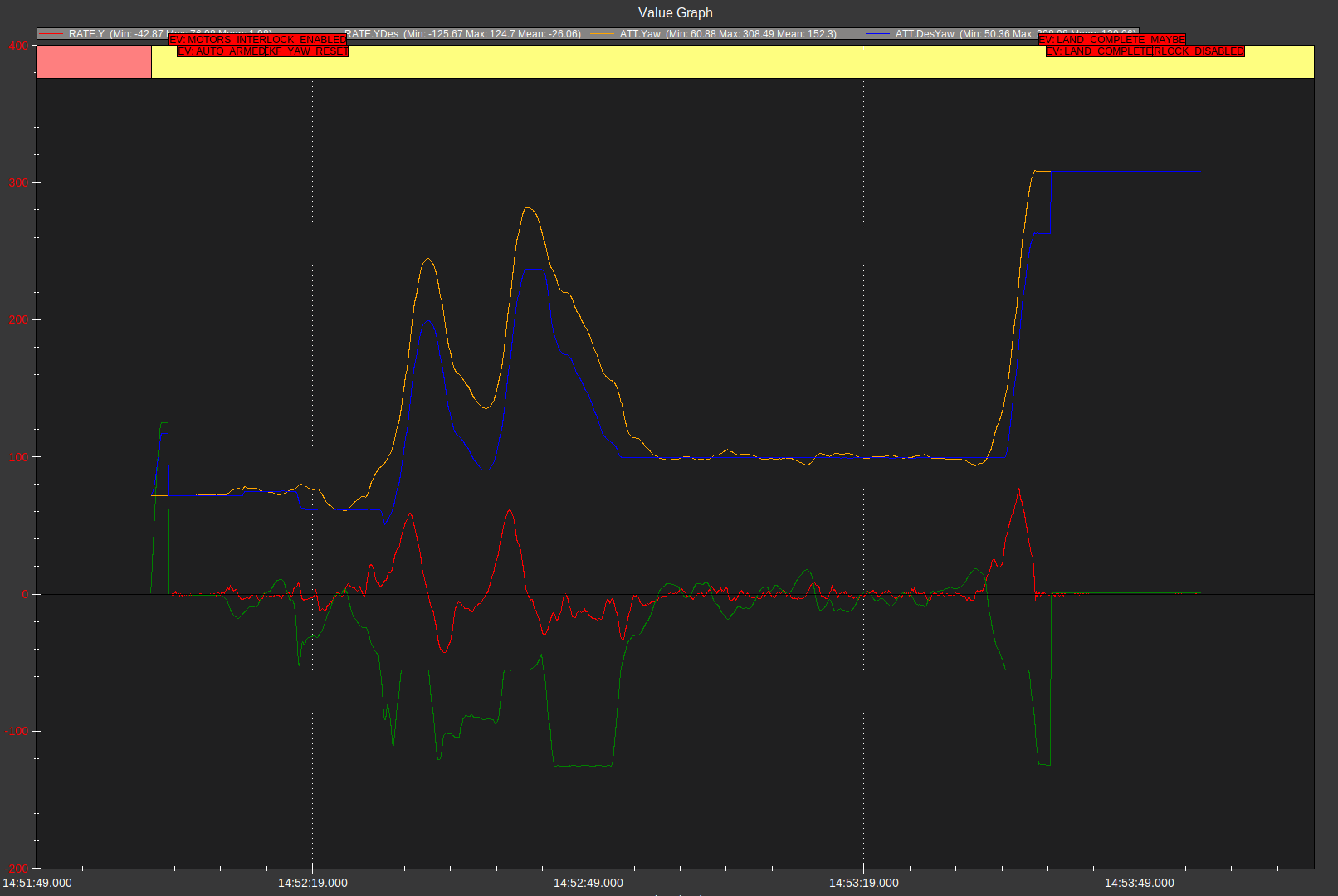
The issue is that the drone sometimes starts spiraling without any yaw input from the controller.
The desired yaw seems to follow the actual yaw when the spiral is observed, I do not understand how this is possible. Also, the desired yaw rate doesn’t seem to have much of an impact on the output yaw rate while the spiral is occuring.
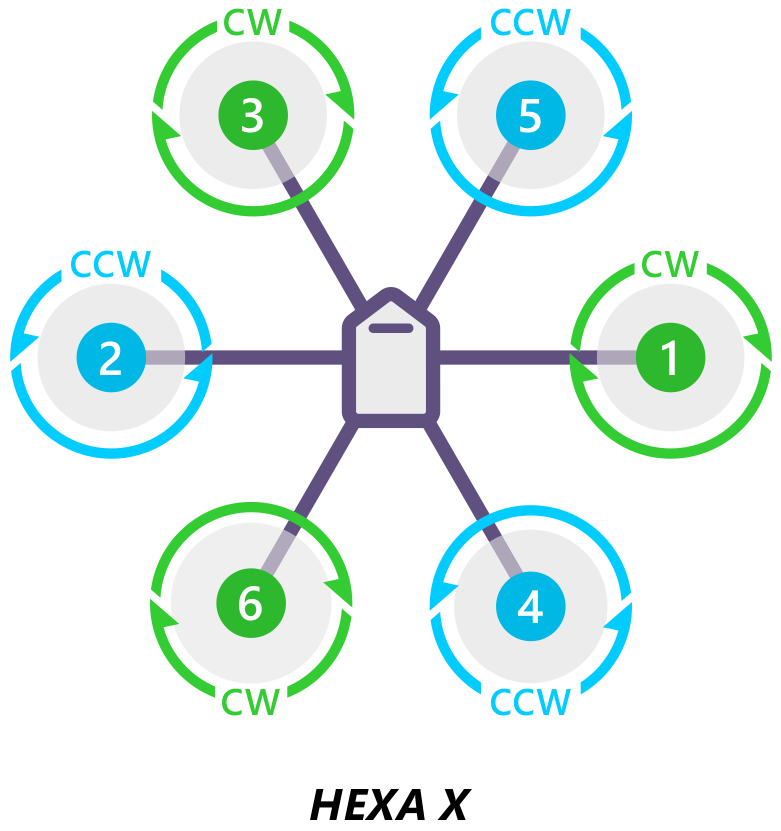
The Aurelia X6 uses a FRAME_CLASS Hexa and a FRAME_TYPE X, which corresponds to the image below:
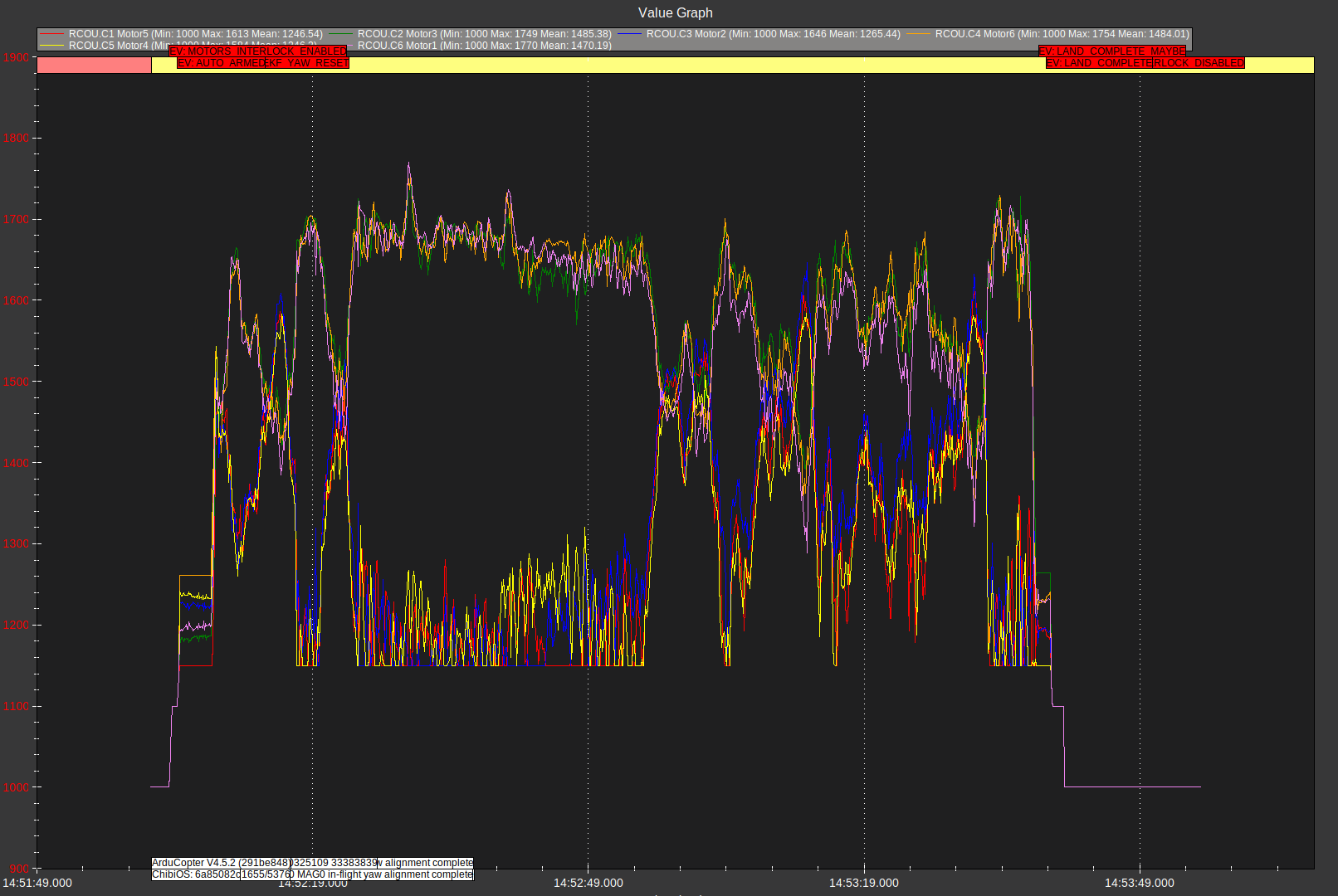
This leads to the most unexplainable behavior. The RCOut seems to show that the motors are controlled in 2 different groups (1, 3, 5 and 2, 4, 6), this doesn’t seem to make any sense considering that both groups have CW and CCW motors. Also, since both groups are on different sides of the drone and that their inputs have such a huge difference, the drone should be performing flips, but yet, it is only spiraling in yaw.
Here are the possible causes that I have already looked at:
Wrong motor mapping:
I took out the drone’s props to make sure that the motors were mapped properly and they do match the HEXA X image shown previously.
Center of mass imbalance:
I can balance the drone along the axis between the two motor groups (between motors 5 and 6) withtout any problem.
Motor/ESC 5 or 6 failure:
As soon as I use the stock landing gear, the issue disappears, which eliminates this possiblity.
I’m all out of ideas to explain the 2 motor groups behavior. If anyone could help me figure out this issue, it would be greatly appreciated.

