We really appreciate these fast answers! Big thanks! =) Yes, we want to fly, but when this forum is alive, the development continues even faster and we fly more. 
Okay… we have to fly when we start, no timid acting from here on.
After arming (props are turning in idle) and we put a little more throttle and leave it there, the rpm increases and after a while it falls on its side. Why is it increasing its rpm? (We know why it tips over, now).
The variance between CCW and CW. Is it possible it is because one motor is above the others? Or is it because of bad RC Calibration? I mean, is it a problem? Could it be a problem?
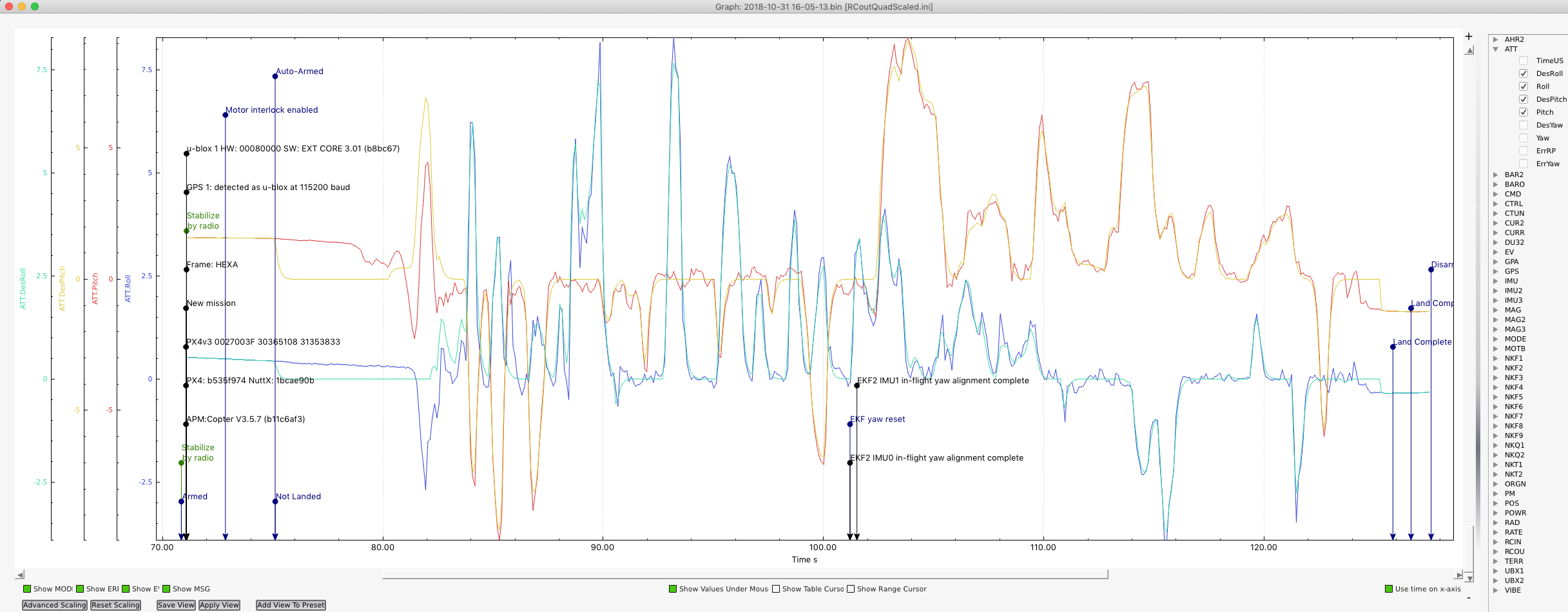
Is there a similiar program for the logs for Windows 10 as you use Mike? It looks a lot more detailed.
What do you mean with motor alignments? They are bolted onto the carbon-fiber motor-mounts that looks like these (no rubber between I realised now, should we use that?): http://www.rc-drones.com/images/vulcan-quad-2.jpg
The motors are Tiger Motor MN4014-9 400KV 4-8S 30A 150g 900W.
The propellers are Tiger Motor Carbon Fibre 14x4.8".
ESCs are HobbyWing XRotor Pro 40A 3-6S OPTO with DEO deactivated.
The props are balanced from factory, but I did it again with a balancer to get them better balanced. But I have a magneto-balancer on the shoplist.
Trims, no, I hope not… but what do we know… we flew in the pitch black dark. Have to check that one.
RC-calibration was done during calibration of the controller after firmware was loaded. Not since that. Are those midpoins a problem? Its only 3… Ah, you mean thats why there is a variance between CW and CCW?
Noise when flying… do you mean from RC-receiver through SBus to the Pixhawk 2.1 or is it interference from something? Vibration noise? Electrical noise?
Autotune… have never used that. Have tuned the PIDs myself if needed. But Autotune are going to be tested with another multicopter any day. Can it flip the Vulcan? It is big. It seems so unstable in hovering. Not vibrating or twitchy, it looks like it drifts slowly and dont know that it is leaning, like it is in manual flight mode. And if you correct it, it drift another way. Guess its because ground effect also. Have to fly more. 



{kind=link}