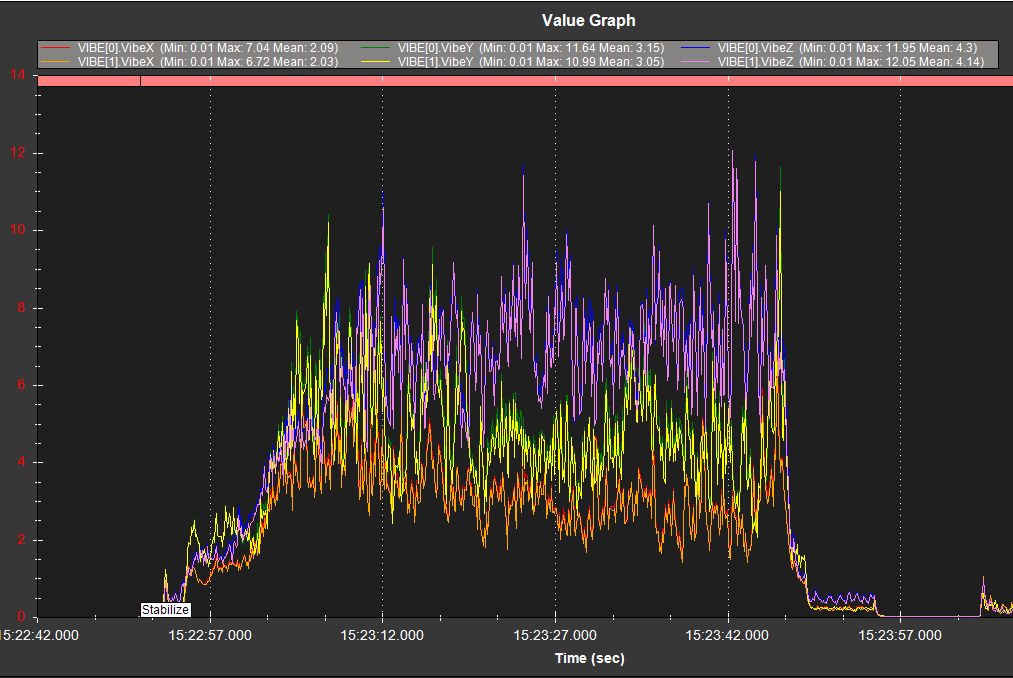
My “550” hexacopter’s log shows that it has high vibration levels, with Z-axis maximum somewhere in the low 60s and Y-axis maximum in the 50s. The copter flies well and, with the props removed, shows vibration levels less than 1 in all axes. I’ve checked the props again, and they’re all perfectly balanced and fit snuggly on the motor shafts, so what could be causing the high vibration figures?
The props are Master Airscrew MR series 10 x 4.5 and, as you can see in the photo, they pass close together (12mm) while spinning. Could this closeness be the cause of the vibration? If so, I could get some 3-blade 9 x 4.5 which would increase the clearances by 25mm.
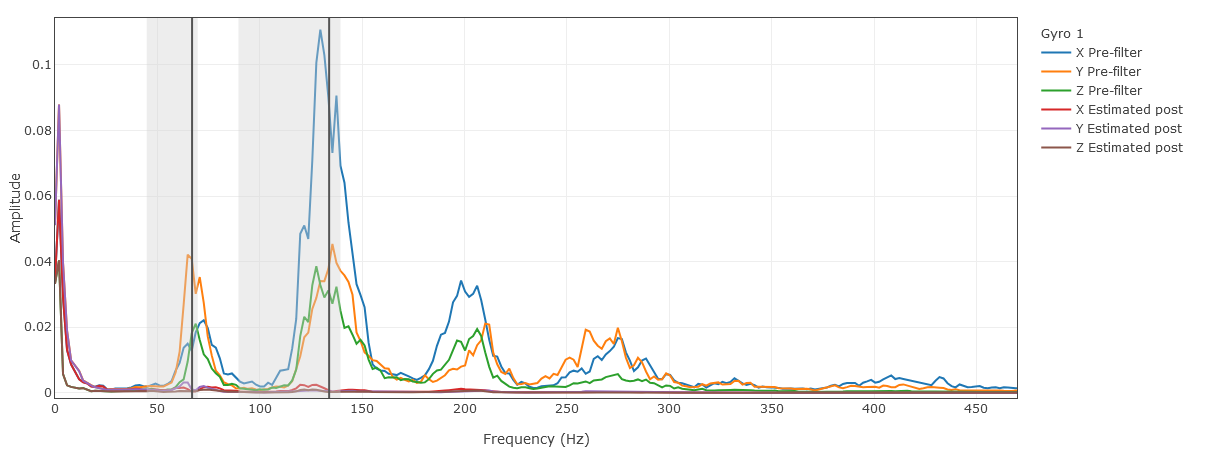
I still haven’t got my head around which direction the vibration is, so here is the log from the latest flight in case the vibration frequency and direction can suggest anything to the forum experts.
Y axis vibrations are higher than X axis, so there is probably some wiring or something rubbing or pulling on the flight controller. Or it’s antivibration mounting is not “equal” in all directions.
Z axis vibrations are also a bit high, which could be more of the same, or even prop wash.
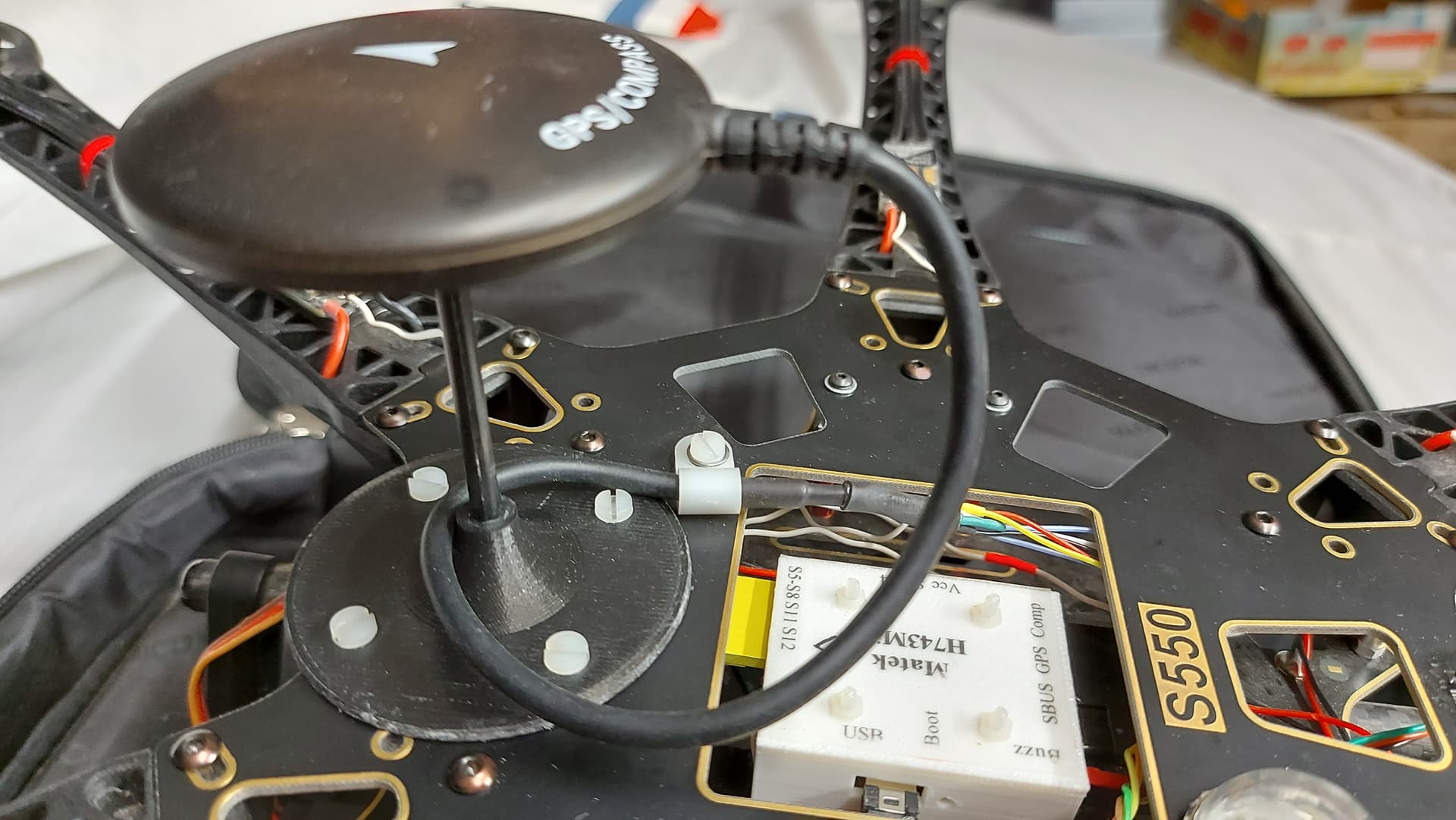
Your GPS mast could be vibrating too, the GPS cable should be secured to the mast and then to the frame before it goes to the flight controller.
Show a picture from the side.
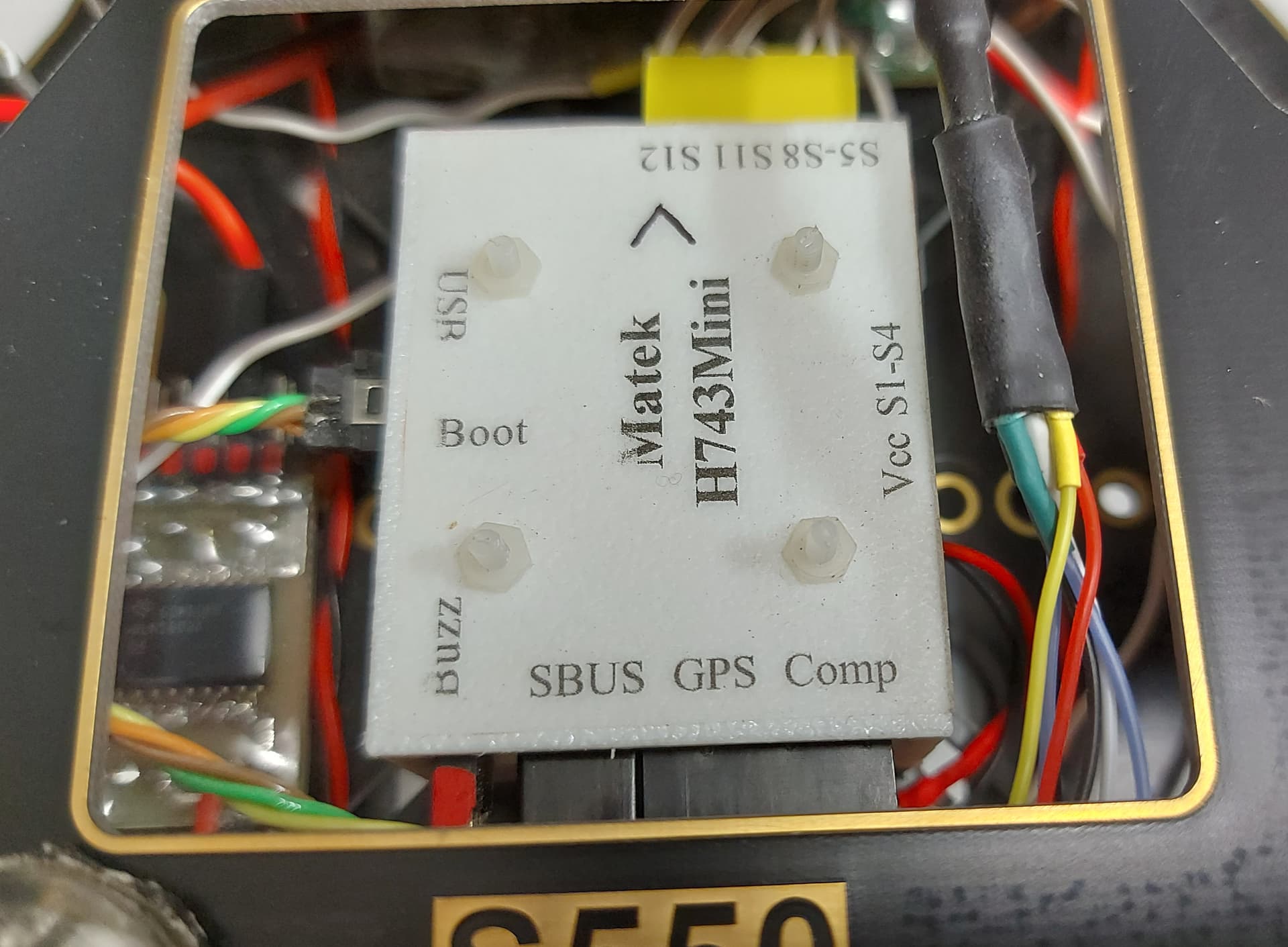
Show a picture of the flight controller and mounting with wiring.
For other issues:
The current reading is following the voltage reading, so it looks like the current sensor is set up wrong. But voltage sensing could be correct.
You battery voltage is dropping a bit fast so you might need a bigger capacity battery. Or potentially change to 4 cell and 9 inch MR props - this would remove doubts about the prop clearance and still give good thrust.
Connect to MissionPlanner, Initial Parameters - put in your prop size and battery cell count, select “suggested” settings then write and accept everything is offers.
This will fix up some of your battery voltage settings and failsafe actions.
Then set these:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,40
INS_HNTCH_FREQ,90
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.17
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
After you worked on the vibrations issue then do another test flight with those updated parameters.
Those DJI style arms are also known to be pretty floppy. They are notoriously bad for vibrations. Many of us have had fights with those. In fact one is on the shelf near me right now… it has a lot of dust on it.
Thanks for your analysis Shawn. Taking your points one at a time:
The Matek H743MINI FC is mounted in a 3D printed box using nylon bolts and the supplied isolation grommets. The box itself is mounted to the frame with a single Kyosho 5mm gel pad the same size as the base of the box.
The GPS mast is 4mm CF 60mm tall. I don’t think it could be made much more rigid. It’s cable is tied to the hex frame with a nylon clip, which I think is a bit loose so I’ll put a wrap of tape around the cable there to make it a bit tighter. I’ll also put a cable tie on where it curves around the mast. It’s end is finished in 30-gauge floppy wires for connection to the FC.
I’m not using a current sensor, so I don’t know where the current reading comes from. The 3S 3900mAh battery is about 10 years old but sees to be adequate for my purposes, having completed a 12-minute flight with 32% capacity remaining.
I did put in prop and battery data in MP Initial parameters when I first set it up. I’ll check it again, and input the other parameters you’ve suggested.
This may possibly be a source of vibration. The RunCam Split camera module is mounted on four soft rubber anti-vibration mounts. I’ll use gel tape instead, if the measures mentioned above don’t achieve anything.
Hmmm, I didn’t know that my arms are “DJI style”, nor that they’re notorious for vibration. They do seem to have a much thicker centre spine that the ones shown in Shawn’s picture, so that’s got to be good.
As well as inputting the suggested INS_xxx parameters I tied the GPS cable to the mast, and put tape around it to make the white clip tighter, and the resulting vibe log is much better. The RunCam is still mounted as before.
Only one thing confusing me now, Halfway through this 1-minute flight I got a beeper alarm which I see from the log is “Err: FAILSAFE_BATT-1” even though the voltage never sagged below 10.54v (3.51v per cell) and the per-cell low voltage was set at 3.3v. Looking at the param file I see that BAT_LOW_VOLT is 10.8, which is 3.6v per cell. Is this (3.6 vs 3.3) a program error or deliberate? Flight pack was uncharged since Sunday’s 12-minute flight, so 37% at the start of flight and 25% at the end.
The battery is a Thunder Power Prolite 3S 3900mAh LiPo purchased on June 30 2011, with 65 flights on it to date. I usually fly by the clock and, since I didn’t get this low voltage alarm until after my full 12-minute flight, I think I’ll not tinker with voltage settings.
Shawn, how do you determine the _HNTCH_xxx settings? I’d like to try reducing the vibe figures for my three helis
I could tell you, but then, well you know the rest…
It’s simple, I have a spreadsheet for initial parameters that includes a formula with rough frequency calculation based on prop size - it’s not perfect or accurate but near enough for a starting point. Derived from collected data.
The battery voltage settings you have are correct and allow the copter to save itself and save the battery. If you fly till the battery reaches critical level then start worrying about trying to return to a safe landing site, the battery will be damaged. If the failsafe happens more frequently or sooner than you expect, it’s a problem with the battery capacity, not the voltage settings you have.
Also set these, because you can not accurately monitor battery voltages manually when you get busy, or if the battery capacity has a bad day.
Do some flying in AltHold mode, so the hover throttle value has a chance to learn. Also check out Loiter.
The hover throttle value should end up being about 0.25 for this copter.
You can also set these now:
ATC_RAT_YAW_I,0.05
ATC_RAT_YAW_P,0.5
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.5
PSC_ACCZ_P,0.25
Give it a test flight again, then probably move onto Autotune, one axis at a time using this parameter: AUTOTUNE_AXES
but no need to do the Yaw D tune.
Thanks Shawn. Weather is not good here at the moment, but looks like I can go out on Sunday to do some calibration flights with the revised parameters.
Hmmm. Not a good result; No physical changes to the copter, but all suggested parameter changes have been made, except for the BAT_FS_xxx ones. The flights today show vibe levels have gone back to what they were before the first INS_xxx_xxx changes. Certainly much worse than the 1-minute test hover I did after the first changes.
Yes, vibrations are still unacceptable.
No amount of changing parameters changes vibrations - it’s a physical issue that must be physically fixed.
The filters are there to try and prevent some of that noise from entering the control loops.
If vibrations were reasonable and now they are not, then something has been disturbed, like where you strap on the battery for example.
The harmonic notch filter values are working fine, no need for any changes there.
If you permanently solve the vibrations you can just run Autotune.
Just a general observation:
It’s stark the difference in the tuning process between a high vibe craft and a low vibe craft. With the later you systematically step through well defined process’s and Auto Tune completes it. The former is usually a lot of screwing around chasing gremlins along the way. I have mentioned it before but I have yet to see a vibe mount too compliant for a non-isolated IMU FC. On one quad I have with that FC I stacked 2 squishy grommets and vibes are very low, tuning was a breeze.
Yes, I understand that the HNTCH parameters are not stopping the vibration; just allowing the FC to compensate for it. Props are perfectly balanced, and battery is the same one attached the same way as normal – velcro on the pack and on the mount, and velcro strap around it – and, unless I can find anything that’s physically changed, the only change from the flight that gave me the graph in post #8/15 is the parameters.
The vibes were much improved after the first adjustment of the parameters (post #2/15) as shown by the display in post #8/15. Previously they had been reaching highs of 30+, just like they are now in the latest log. I’m unlikely to have time to persue it this week, but I was planning to check the copter physically again then revert INS_HNTCH_FREQ, INS_HNTCH_BW and INS_HNTCH_REF back to the values in post #2/15 one at a time to see which, if any, has brought about this change.
Well, I’ve just made time to run a few test flights
I started by reverting INS_HNTCH_ FREQ to 90, _REF to .17 and _BW to 40 (i.e. as per the recommendations in post #2), and the vibe graph was back to what it was a couple of days ago with a maximum of Y = 14.14.
I then ran test flights with all permutations of the three changes suggested in post #8 (everything else as per the recommendations in post #2), with the following results:
_FREQ = 64, _REF = 0.17, _BW = 40 gave max vibe is Z = 22.14.
_FREQ = 64, _REF = 0.22, _BW = 40 gave max vibe is Y = 15.27
_FREQ = 64, _REF = 0.22, _BW = 30 gave max vibe is Z= 28.06
_FREQ = 64, _REF = 0.17, _BW = 30 gave max vibe is Z = 19.27
_FREQ = 90, _REF = 0.22, _BW = 30 gave max vibe is Z = 16.73
On that basis I’ve reverted back to all the settings from post #2 since that gives the lowest peak vibe. That’ll do me for the moment, unless that data gives you any insight into possible further improvements. Now I’m going to check out MagFit