Could someone more experienced please take a look at the attached logs?
The problem is random roll/pitch twitching of the drone. At seemingly random intervals there’s a glitch causing the drone to suddenly pitch/roll, sometimes it recovers immediately and sometimes it goes out of control and crashes. Besides the random twitches it looks stable in flight.
It could be a tuning/settings problem (can see that the roll/pitch often overshoot the desired) but decreasing the default PID values a bit didn’t seem to have an effect. Or it could be a problem with the hardware/frame - the 3d-printed frame may be a bit too flexible or it may be some issue with the cheap ESCs/motors.
I’m planning to print a more rigid frame, but any ideas besides that?
3d-printed hexacopter frame with 5.1 in props
Arducopter 4.3.7
Flight controller Matek H743 slim v3
RadioMaster Zorro + RP3 (ELRS 3.2.1 EU LBT)
Not sure what you have going on with the Notch filters. Why don’t you disable the 2nd Notch and configure the 1st one for throttle (disable FFT) at default values and set these and make another short Althold hover flight:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
You will have to review it, a .bin log file is required to run the FFT analysis on a log.
Another test flight with INS_LOG_BAT_MASK enabled.
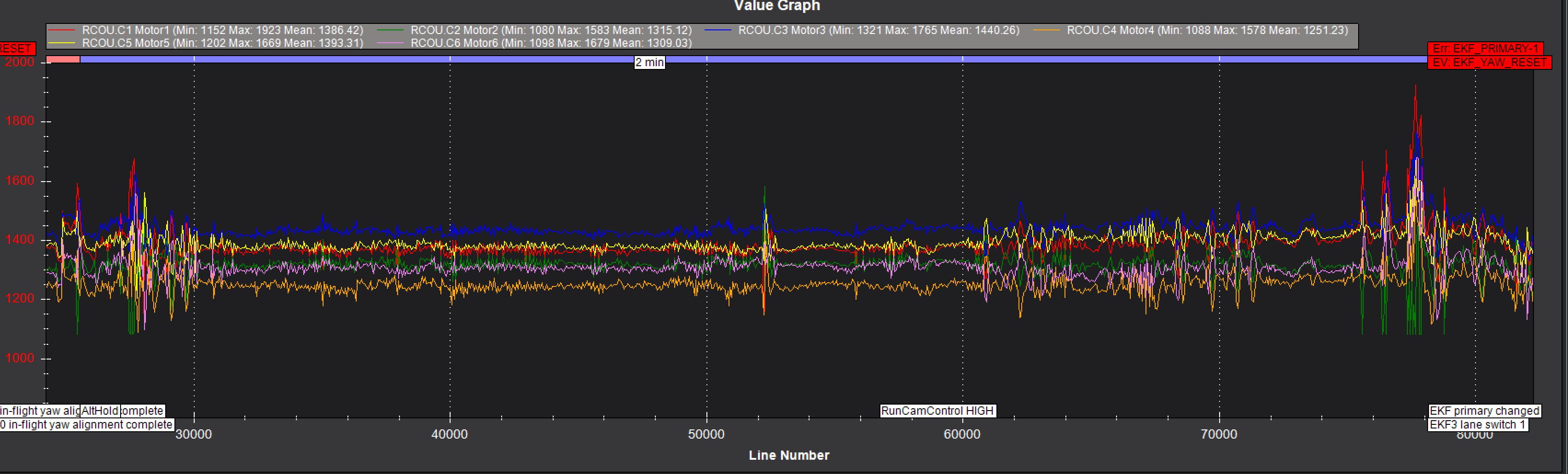
Did some tweaks, upgraded ESC firmwares and replaced motor 1 that wasn’t always spinning well at idle speeds. The issue persists and is even more clear in this log as the twitches happened multiple times in rapid succession and always to the same side.
My interpretation is that something is wrong with the ESC of motor 1 which is causing it to lose power intermittently. I’ll check the connections and order more (better quality) ESCs, but I’d still appreciate it if someone else has time to take a look at the logs as well.
The log shows what you suggest. Intermittent thrust loss on Motor 1. Could be the Motor, ESC, wiring. Create the same plot I posted above and see for yourself.
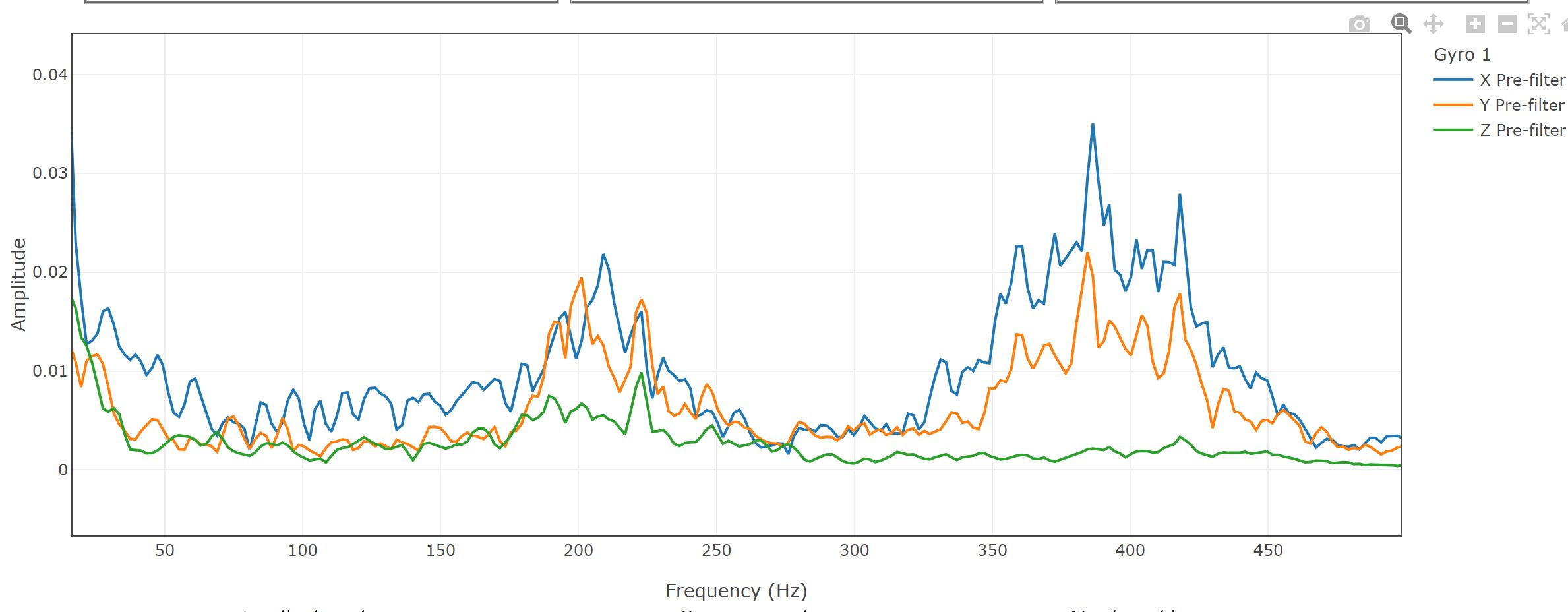
It doesn’t do us any good with .log file format, needs to be .bin to review FFT data.
I think you will have to fix the thrust issue before confinuing with the Notch filter configuration. This log can be viewed but I would say it’s being influenced by this. Here is the pre-filter result: