I have a hexacopter drone and have conducted two tests using different firmware versions: ArduCopter v4.5.2 and ArduCopter v4.3.7.
In both tests, I’ve encountered the same issue:
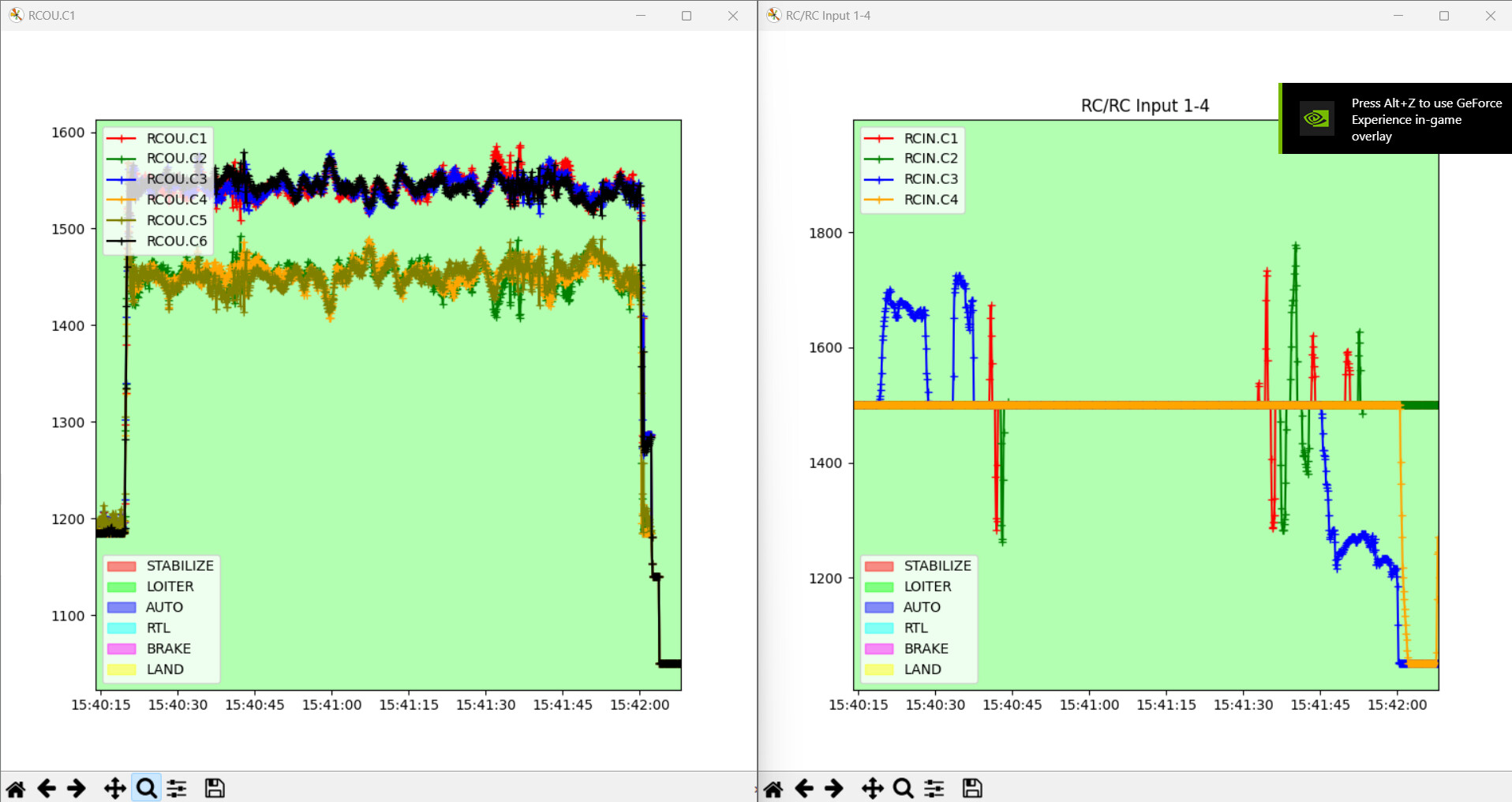
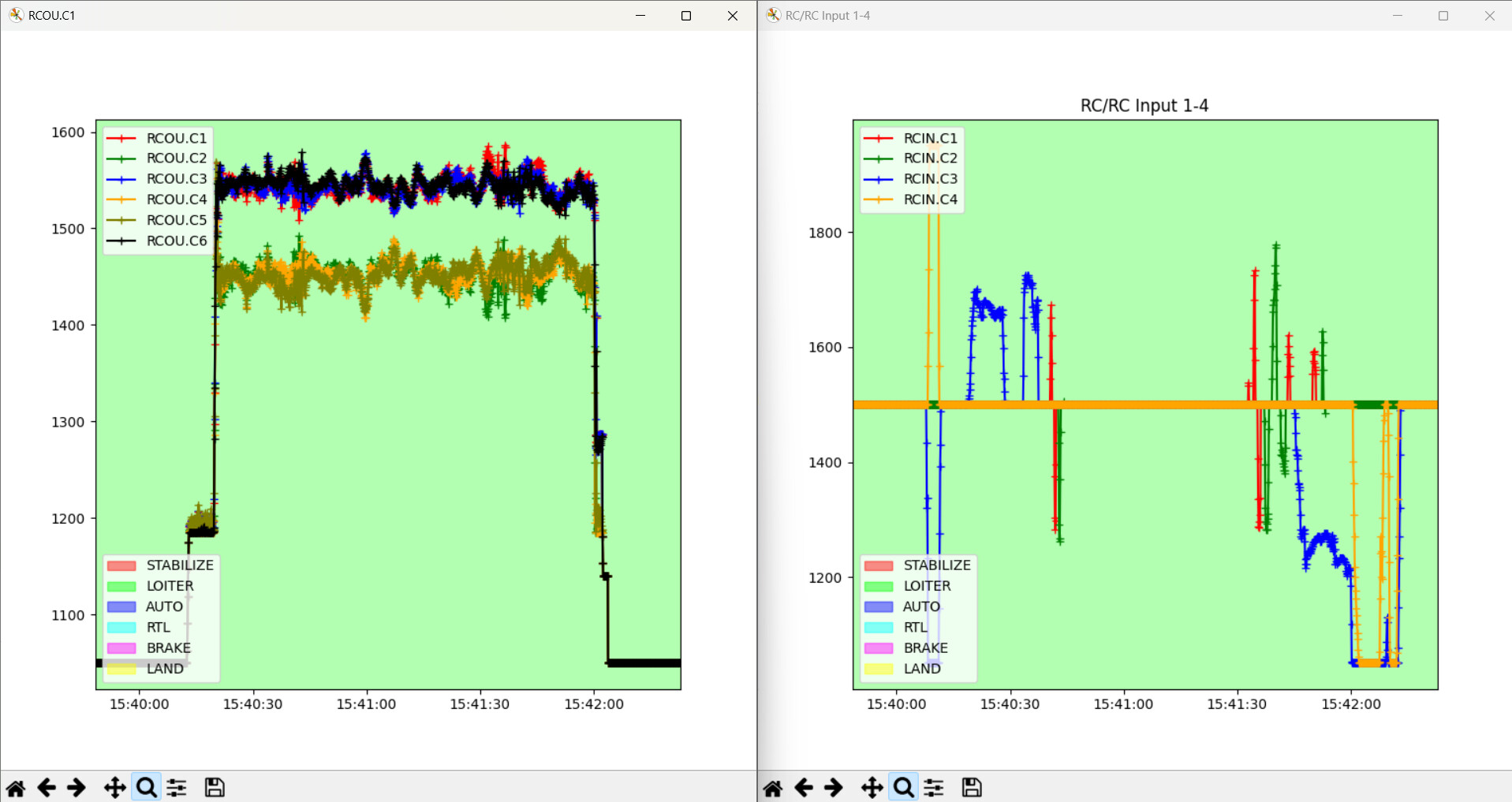
Motors 1, 3, and 6 are spinning at higher PWM values, while motors 2, 4, and 5 are spinning at lower PWM values.
The snapshots for respective tests have been attached below:
Arducoptor v4.5.2
I have thoroughly checked the motor alignments and performed multiple calibrations to ensure everything is correct. As a newcomer to ArduPilot, I’m uncertain whether this behavior is expected or if all motors should be spinning at the same PWM.
For your reference, I have attached the drive links to both the flight logs.
Any suggestions or guidance on this issue would be greatly appreciated. Thank you!
Hi Dave,
The Lua script is to operate a robotic arm mounted to the drone.
The design of this arm is detachable, so the arm was not mounted during the tests.
As per your suggestion, I’ll check the motor alignments again.
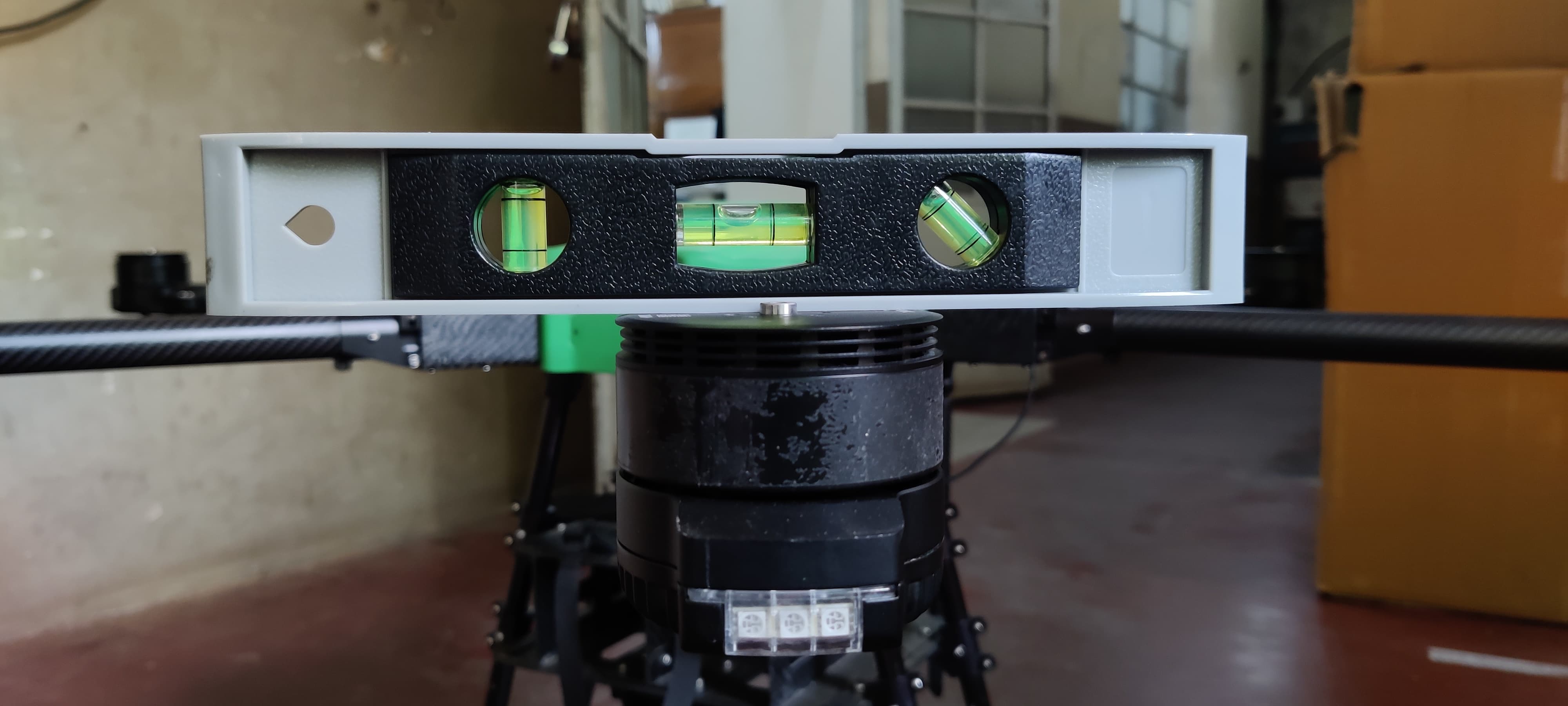
I have checked the motor alignments using a spirit gauge; the motors haven’t been touched since last flight. Attaching snapshots for the same.
Ground Level:
The drone seems to experience an auto-clockwise yaw. 1,3,6 CW.
You have a few GPS issues, I am not sure if that is the cause.
As @amilcarlucas said, has your channel 4 yaw stick got a trim accidentally set?