I made a topic not so long ago, regarding my hexacopter falling and someone said it was probably the motors that couldn’t handle the weight (i.e. didn’t perform as spec’d). However, I can’t accept this because that would be evident right upon take-off and not after some time performing good. Right ?
So, I have another hexacopter using:
Pixhawk 2.1
DJI E800 kit (E3510 350KV; 13x4.5 prop, 20A ESC)
AUW: 6.1KG
I was doing some auto mission, a lawnmower patterns, it was performing fine (apart from weird yaw, where the hexa reached the waypoint and then would start going to the next one but going backwards and suddenly doing very abrupt yaw and also some minor altitude loss ~1.5m to 3m)
The hexa did this pattern one time, then I changed to Stab -> PosHolder then Auto again, it started 2nd time doing the pattern and everything ‘good’ so far. On to the 3rd time, it starts doing the pattern and about half the pattern it reached the waypoint and when going to the next one, it just lost altitude and hit the ground.
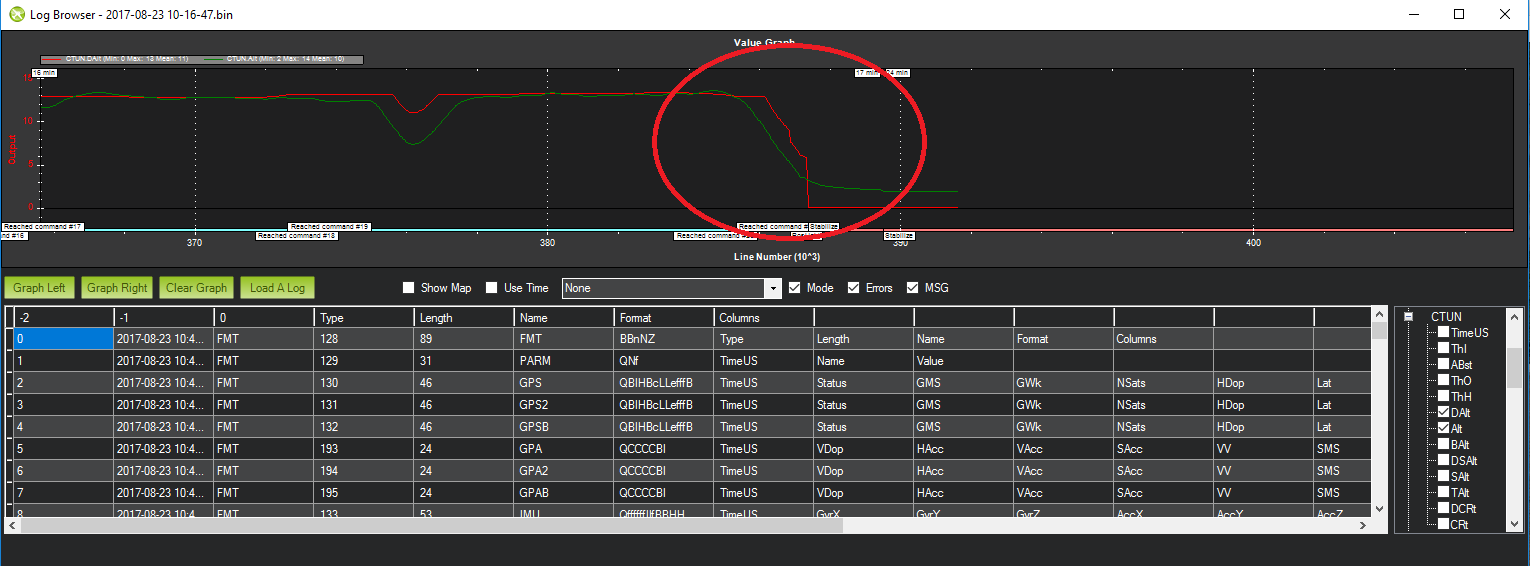
CCW motors are performing less than CW : Why this ?
This set of motors are same model as the ones I used before but they are NOT those ones. I find it very weird that in two independent set of motors, the CCW are always the ones performing poorly.
Platform is a little unbalanced (like more weight on the front), but what does CCW motors have to do with this (shouldn’t be motors 3 and 5 the ones working harder in order to keep the front level’d !?
Motores are spec’d to: recommended thrust 800g (2000g max thrust each @ 14Amps), I have bench tested each one, and they are pulling the 14Amps. Find it hard to believe that they can’t handle ~1016grams each.
If it’s related with AUW of the platform, why did it execute the first 2 patterns and lost altitude on the 3rd time ?
I will explain 2. and 3: you shouldn’t stress dji E800 motors above 800 grams/motor. I have similar hexacopter, and it flies great with AUW up to 4 kg. It feels heavy at 4.5 kg, but its OK. Above 5 kg - NO WAY. For comparison, DJI Inspire 1 has AUW 3 kg (with 4 motors).
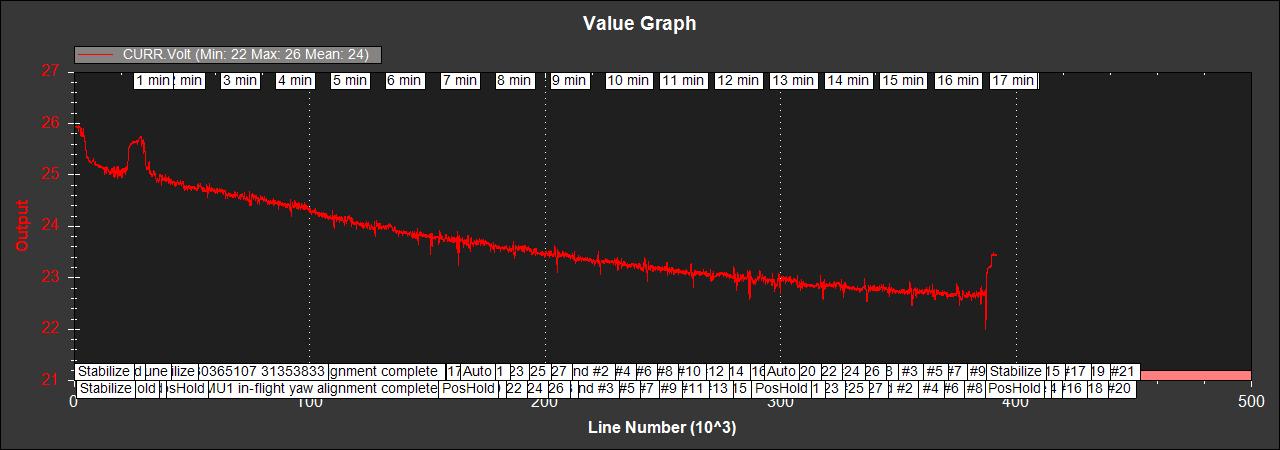
Your reasoning that “it was OK initially” was wrong because voltage of the battery is decreasing during the discharge (and internal resistance is raising). Have a look at your logged battery voltage:
At the end of your flight, voltage dropped 10%, which means that the available power dropped at least 20%. When your battery is full, it can lift the copter, but when it loses 10% of voltage, it can’t even keep it in the air. Btw, what kind of battery is this? If regular LiPo, it looks overcharged initially at 26 V.
Bottom line: reduce the weight to 800 g/motor and balance your frame.
P.S. You have problems with the compass too. Running log Auto Analysis it says:
Test: Compass = FAIL - Large change in mag_field (82.49%)
Max mag field length (662.50) > recommended (550.00)
Hi Nagib,
first let me thanks for taking your time to look at this.
Regarding :
A see only one motor, that is indeed not perpendicular to the arm. It’s not by much but certainly it can induce this yaw.
You say AUW too high, but the recommended weight for motor is 800grams, but they can go up to 2000grams. I only need them to produce 1000grams each, you think it’s not feasible ?
Well, I agree with you, this is my first ‘heavy lift’ hexacopter, previous builds were quadcopters and I managed to overcome the issues that have arisen.
I’m using a regular LiPo (Tattu 7000mAh 22.2V 25C 6S1P), so full charge they are at 25.15v and nominal voltage is about 22.2V . The issue you see on that CURR.Volt graph is produced by the improper calibration of our power meter, but i know for sure that battery is 25.15V when it’s full and I won’t go below 22V.
So you’re saying that at the end of my flight if I have the battery at its nominal voltage, it wont provide enough power to the motors to keep the aircraft in the air ?
It is feasible, but not recommended; what you are trying to do is on the edge of the possibilities of your motors. I use DJI E800 set, I have benched it, played a lot with that system. In order to get 1.02 kg of thrust from DJI 3510 motor, you need about 75% of linear throttle (with full battery). DJI considers 92% of throttle as maximum input (ESC LED becomes yellow), so the narrow range between 75% and 92% is what you have for the dynamics of flight. In ideal world, you should be able to lift your copter and keep it in the air. But, you don’t have enough thrust left for attitude control. Imagine strong wind, when your battery is depleted, your copter will not be able to maintain desired attitude.
Follow my advice: remove something from your copter (temporarily at least) so that it weights less than 5 kg. Test it. You will see what I am talking about.
If you want to keep 6 kg AUW, buy another pair of motors and an octo frame.
P.S. all factory specifications are measured in ideal conditions, have a look at the official DJI site: Max Thrust 2100 g/rotor @ 25 V Sea Level
So, it was tested with full (and surely high-performance) battery, at sea level with ideal temperature, humidity etc etc.