we have a problem with a hexacopter. The copter has been flying for some time and has always flown well.
On the last flight when switching from Loiter to Stabilize, the copter suddenly flipped to the right.
We have only updated the firmware from the herelink to the stable June 2021 and today we did an autotune.
Can anyone help me understand what the problem is?
Sory to read this, i had the same issue with a quad and Y6 starting back in Feb/May, I spent a few months chasing it down but have no idea why. I have video of the issue. One thing is to check your motors make sure they are screwed down well and the GPS is mounted tight. I don’t think it’s the Herelink. you can try to add some slop in the PIDs.
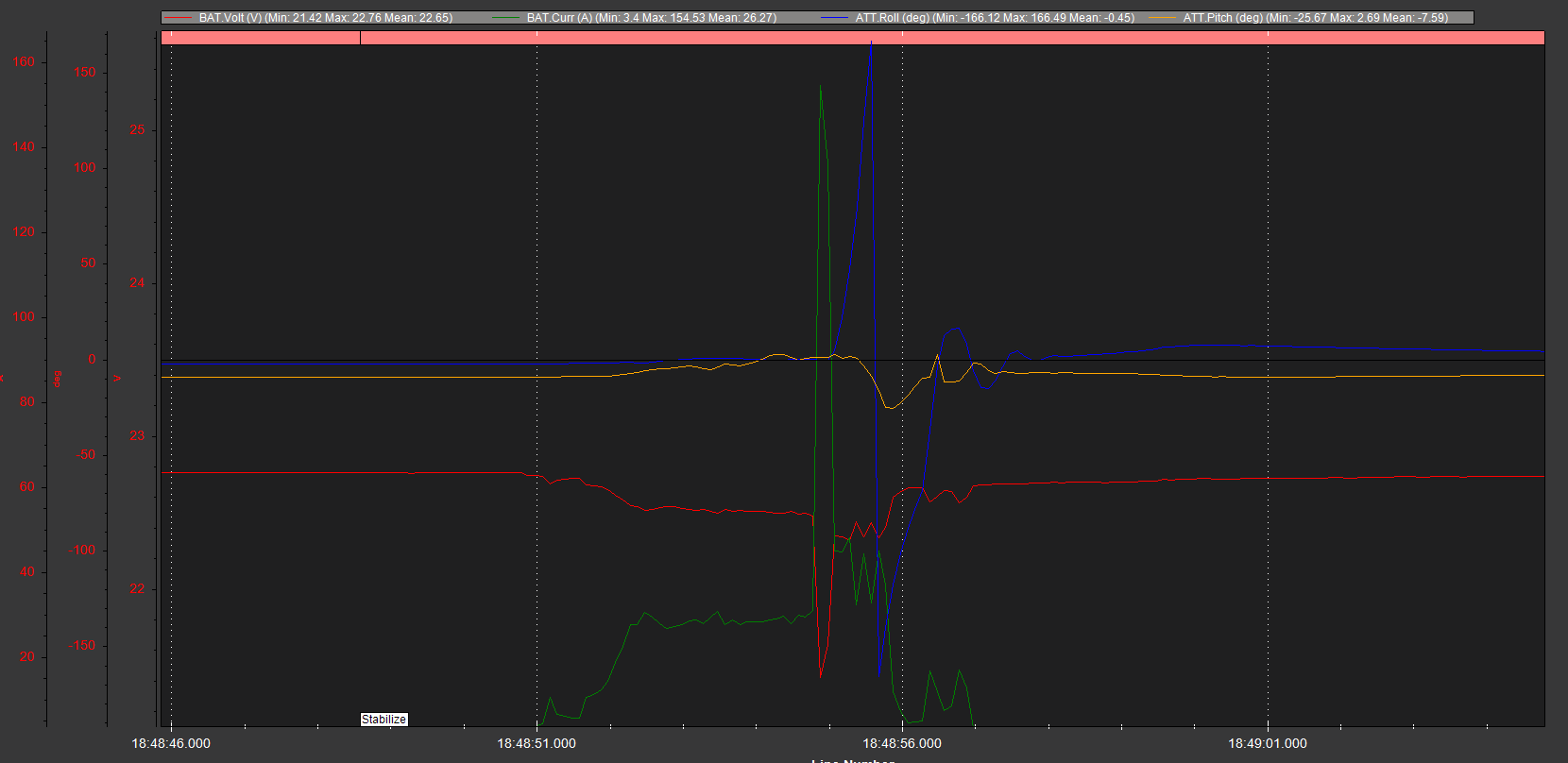
I couldnt see any motor commanded to maximum, so unlikely an actual motor or ESC failure. Maybe just some other short in the electricals between the current sensor and the ESCs.
Thanks for the analysis! I will check the electronic components. I’m just wondering why this problem only occurs when I switch to stabilize. In Loiter or Alt Hold the Koper flies without problems.
I have now checked all the motors and ECS and everything is working fine.
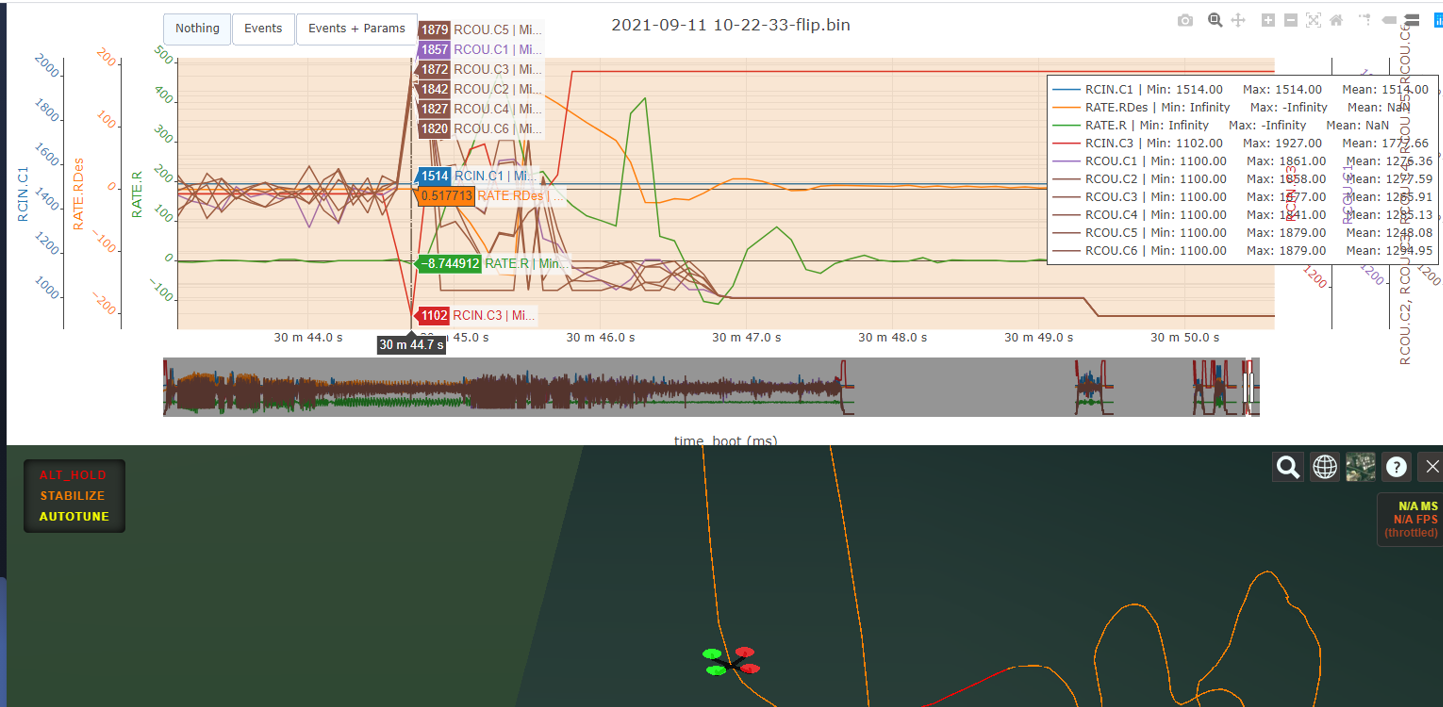
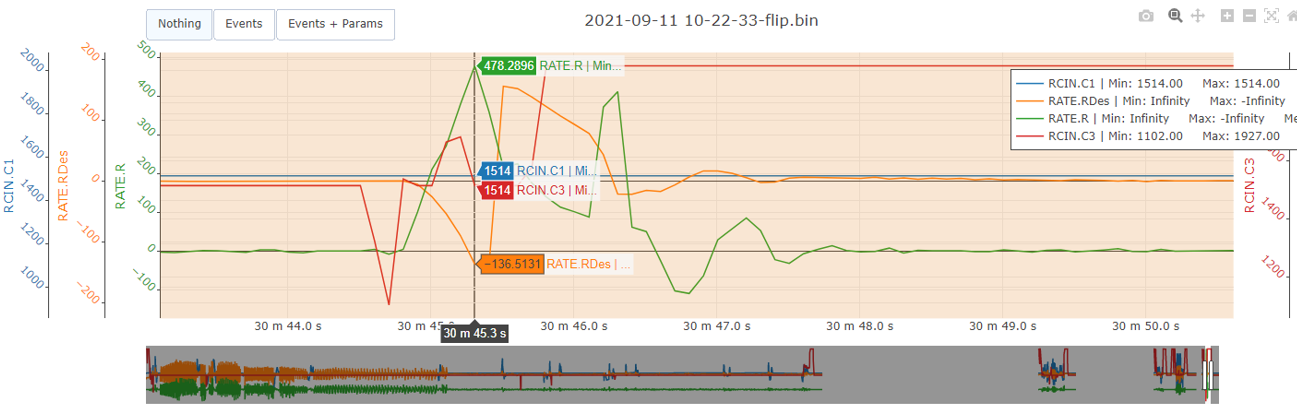
I have checked the log again. At 30m 44.7 the pilot gives the command to climb in stabilize (RCin.C3 =1102). The motors are controlled immediately at 1820 to 1879. The copter is still in horizontal position.
Shortly afterwards RCin.C3 goes to 1514 and the motors are run down, the motor RCou.C5 is set to 1182, i.e. almost switched off. And it remains switched off.