Hi, Hallo everyone. I hope some experience user of pixhawk and ardupilot software in generell can help me, because I try to analyze logs from my last flight, but its for me first time - I try to analyze logs - and I’m a litlle bit lost. I was flying my hexacopter with pixhawk 3.5.4 few minuts. It was maybe one of 100 prevoius succesfull flights. But this time copter fall down imediatelly right before landing, when it was 5 meters above landing point. It was looking like it was in stabilize mode with throttle puiling fast full down, mators are stops and copter fall into ground. But I was in POSHOLD mode. Damages are not big (broken landing gear and camera gimbal), but I can’t find out was what the reason for that. After bringing copter back home I armed motors withouts problems and raised throttle as well a little bit. So after repairing I will be possible to fly again, but I will not do that before find out whats was the reason for above problem. I flying mostly BVLOS with expensiv FLIR cameras and in full dark night, above homes, forest and wather , with heavy 22000mAh lipo, so I “happy” that copter fall down right before landing, and not 1km away from me above homes or wather, or deep forest. So can experience ardupilot user have please look on my logs to find out whats I can’t see ? To maybe find reason of this fall down.
Many thanks in a dvance for help !
…
here link for logs
https://drive.google.com/file/d/1e9FPadsTofzeeEUzku2MoeDIfBnooXb8/view?usp=sharing
The log ends abruptly with the barometer showing ~65m. No indication of why. Your Z-vibration levels are high and you are running a very old version of Arducopter.
Hi, many thanx for answer. Yes I flu at about 65 m, then I go back home, it takes maybe 40 sec, then go down to about 5m , stay a while and suddenly copter fall down as throttle was cut down. I will update to new version but Im still wandering how it was possible and whatscexactly happend.
With the log truncating at 65m hard to say.
The usual cause of this type of truncation of the log would be a power disruption of some sort.
When was the last time you did a service overhaul during your 100 flights ?
I would be checking ALL power connections.
The other possibility is a Flight Controller firmware crash due to bad sensor connections.
But as @Dave points out, we can only give you educated guesses.
Hi, many thanks for answer. Yes You are right, after 100 flights (it was reayl something about 100 flights, each about 20 min) I should perform some big check. I checked main connection before every flight, but to check every connection I have to disassembly drone. And exactly that I’m starting to do. I starting disassembly completely everything , to have empty frame only. And then I will assembly everything back and check all connection and as well soldering , and I will test whole frame (after uploading new firmware) without any additionall expensive equipment as VTX, FLIR cameras, gimbals a.s.o. I will inform if I will found some connection problems or similar, or any others things which can cause fall down.
many thanks for help and logs analysis !!!
Hi. I disassembled already now hexacopter to single parts. Realy silgle parts. And I found that there was problem with power module. Power module simply don’t outputs 5V. I can’t see on power module any problem, no poor soldering a.s.o. Even under magnifier glass. I have second , the same power module, so its simply to compare - one (from my drone) don’t output 5V, Completely NULL on both pins. Of course I had backup power (5VBEC) connected as well to servo rail + Zener Diode. And because of that after falling down, pixhawk was workink. But Im wondering why - when power module failed - pixhawk restart (I assume) instated of taking power from BEC. And why all logs ends on 65m ? when after crash everything looks as working normaly ?
Hi, I have again request for more experience user, for LOGs analise. Aftre completelly new rebuild (but with the same piece of pixhawk FC) copter was again in the air. After some OK test without any additional equipment, I instal camera, Video TX and other and fly. And I have the same situation as last day. After coming back to land, by going down, few meters from launch point, at about 8 m high copter suddenly fall down, it looks like power cut !. But LOGs are differen as last time, so LOGS not end suddenly at f.e. 65 m, but are “visible” till end, with some out of range value at the end. Can You please try to have a look on this logs, to find maybe some resonabe mistake, error ? I I would be very gratefull. Thanks,
Here link to log:
https://drive.google.com/file/d/1-uokmfrIWgTEBe-6J6ME-CTZqNoSNALL/view?usp=sharing
You should really set the Initial Tuning parameters. All I see that you have done is to set the Rate filters to 10Hz which may not be appropriate at all. Update Mission Planner to latest Beta (from Help screen button) and then use the Alt>A tuning Plug-in to configure these.
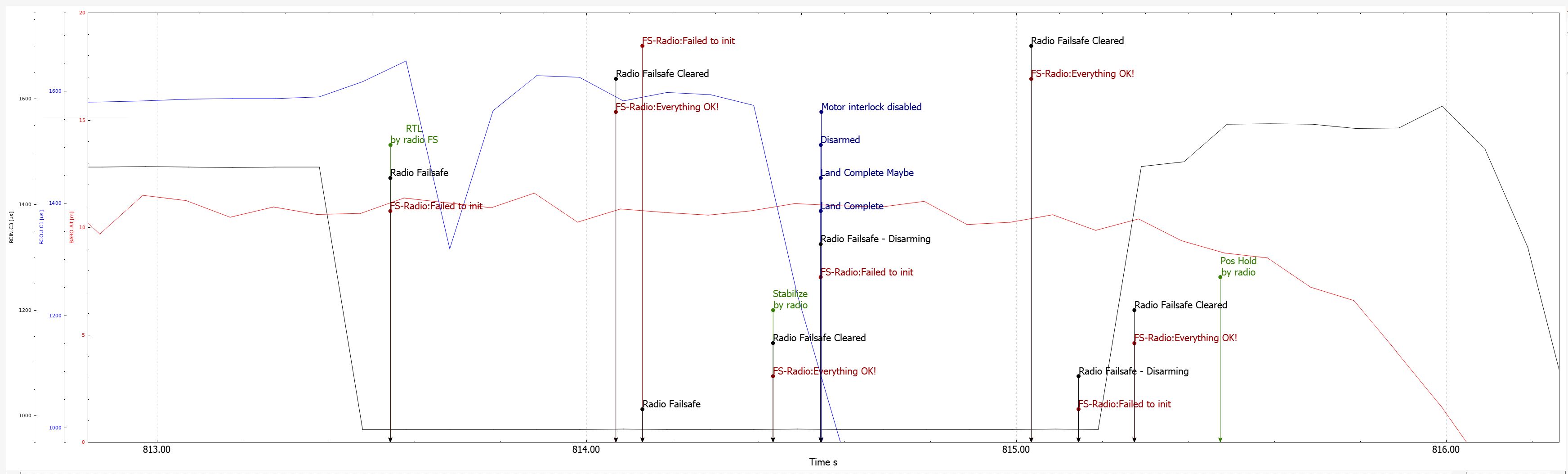
You had a Radio Failsafe into RTL. Then you switched to Stabilize Mode and the throttle was low. Motors were commanded to Minimum and down it went. One Motor output is shown here for clarity but they were all commanded to Min as expected:
Hi, Many Thanks ! So it is looks like it pilot (my) mistake and not software or hardware issue ? Yes, Am I right ? I checked all motor input (me via radio) like You did , and RC outputs, and they are the same. Because if it wasn’t me, RC input/outputs would not be the same ? YEs ? Im wondering only, because I was sure I was in PosHold mode when lowering , and even if RTL was triggered , lower mode is AltHold, so I should switch to AltHold not Stabilize. But if Im realy was in AltHold mode when lowering, and RTL was triggerd (Im was not aware about that in this moment) and next mode is Stabilize. And if throttle Input (RC3) was low at this moment switching from AltHold to Stabilize could cause crash.
Do You see in my log, that I was in AltHold when RTL was triggered ?
And do You see what was throttle input (me) right before switching to Stabilize ?
Many Thanks for looking one more time for my log !
The throttle was down (minimum) when it switched to Stabilize. The motors will then run at MOT_SPIN_MIN.
ok, thanks, but it was switch from PosHold to Stabilize or from AtlHold to Stabilize ?
Graph it yourself in Mission Planner. RCin3 is throttle and modes are shown on the bottom. Click only that box to see them.
This simple troubleshooting skill you need to master.
hi Dave, ok clear, many many thanks for Your Help !!!