A few weeks ago I had my Hexacopter crash after less than 15 hours of flight (so far).
The setup is:
Frame: based on Tarot TL6X001 with some modifications
FC: Pixhawk 2.4.7 fw version: 3.5.5
Motors: Sunnysky v5208 kv340
ESC: Hobbywing x-rotor 40a-opto
Props: RC Timer 17x5.5"
Batteries: 6s2P 16000 mAh Lipo
AUW: 9 Kg
Current @ Hover: 50-60 A
After the crash I discovered ESC #6 was malfunctioned. When I took it apart I realized it’s two capacitors were detached from the board.
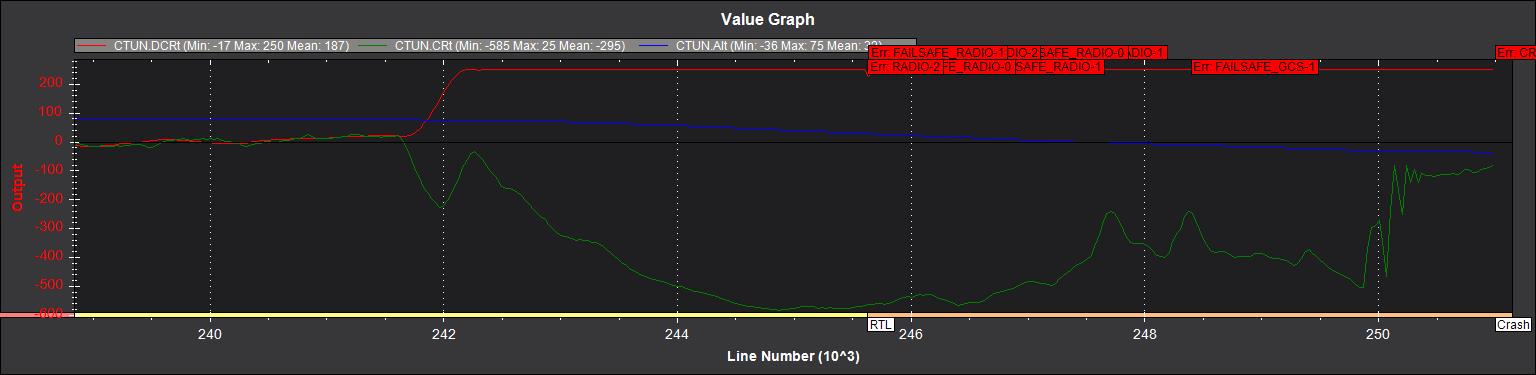
I looked into the log file (enclosed) - It looks like it wasn’t a free-fall but rather a fast descent (aprox. 5 m/s).
When the FC realizes the drone is descending - why didn’t it set the rest of the motors to MAX in order to maintain the height?
Can you tell from the log that the crash is because of ESC #6? or motor #6?
This setup is capable, at least according to specs, to hover with 4 motors only (each motor can produce a 3 kg thrust @ 20 A = 12Kg). However, this doesnt seem to work in this case? can you tell why?
Is there a parameter setting what will occur in case of a motor failure? or to avoid it from rotating along the yaw axis?
1: if it did something that stupid, you would have a really hard, and dangerous crash, it’s more important to maintain some thrust regulation.
2: I’d say it’s more like prop because of the vibrations, you have no current logging, but it’s not very obvious by voltage.
3: Because that theory is crazy salesman-theory before the incident, you were at ~44 % thrust, then remove one motor due to lack of thrust , and equvalent of another one for yaw countering, then remember the AP does not know exactly which is at fault, and scales all thrust proportionally by motor position, not it’s status -
4: there is no parameter that will be SET in such case. if you had some MOT_YAW_HEADROOM in the first place (it’s there by default) it would allocate more to yaw control (at cost of overall thrust). Having it to zero may be a good thing with small power reserves like this, if you are skilled at unassisted stick flight, you could fly it longer with constant yaw rotation and/or land it, or slow descent at will by also using yaw when needed.
Finally, you descent rate vs (none to low) groundspeed indicate that you had a VRS , you could reduce the sink rate/impact pretty much by taking control and getting out of VRS.
You say this is stupid - but the FC itself took motor 6 to MAX. Therefore my question - why didn’t it take the other motors higher in order to avoid the descend?
I wrote in my first post - after the crash ESC#6 was fault. I assume it was the situation in the air, and hence the crash is due to that. My question was - can it be understood from the log as well?
I looked up - and the mot_yaw_headroom was set to 0 on my hexa. However, this didnt seem to help. In addition, when I looked at the telemetry logs - the drone didnt rotate on the yaw axis but was rather steady (at least in this axis). Do you have any comments on this?
As @Andre-K pointed out, your assumptions are not quite correct.
There is something basically wrong happening with your copter.
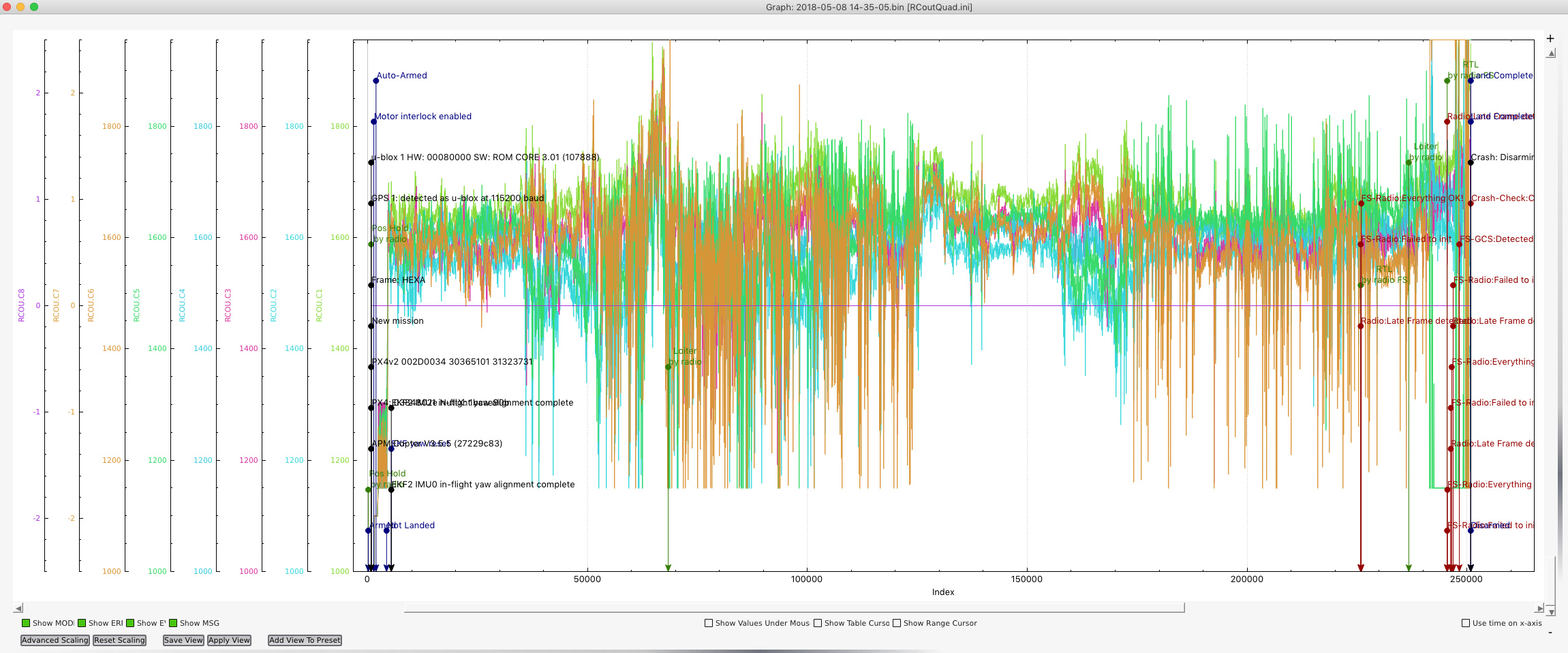
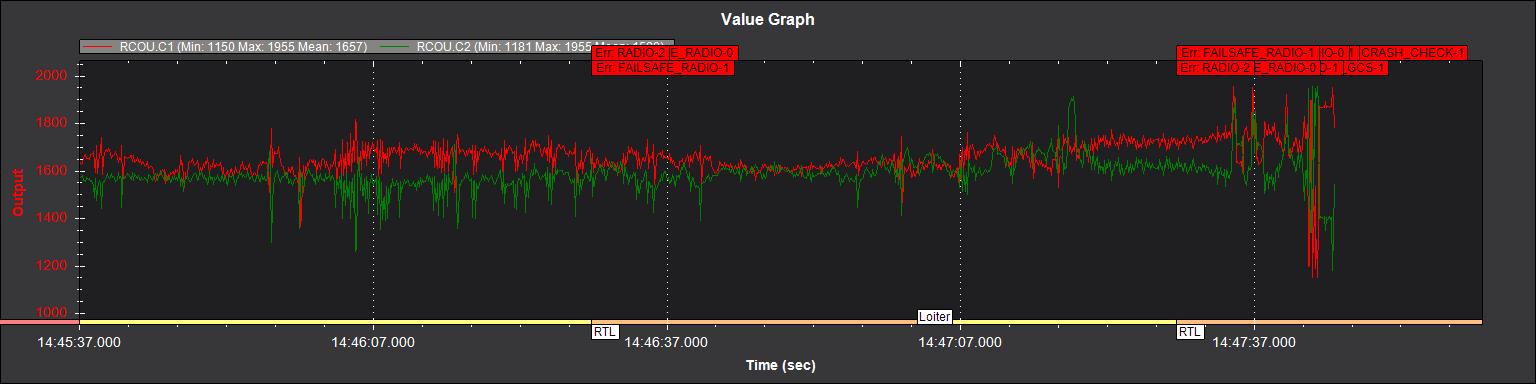
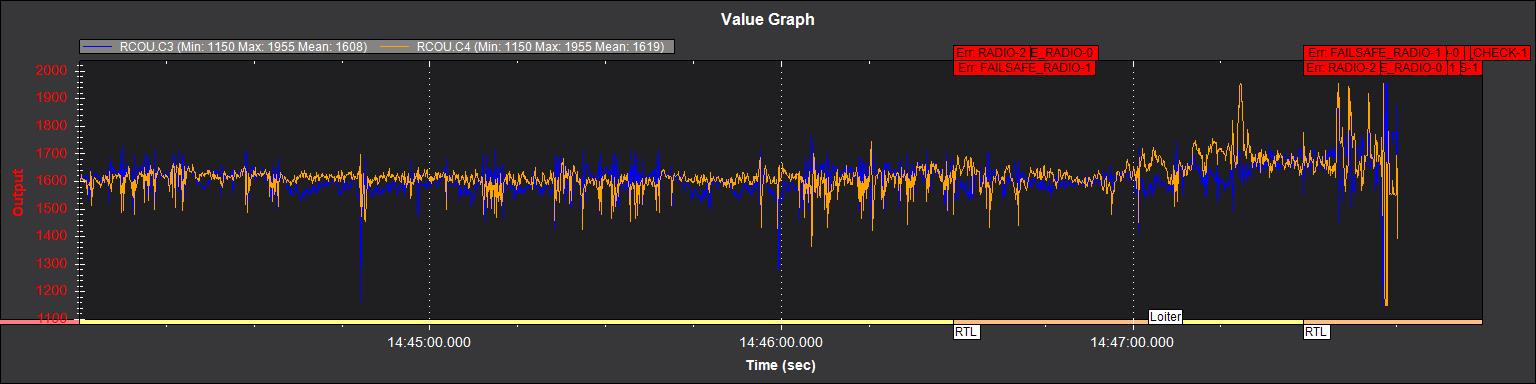
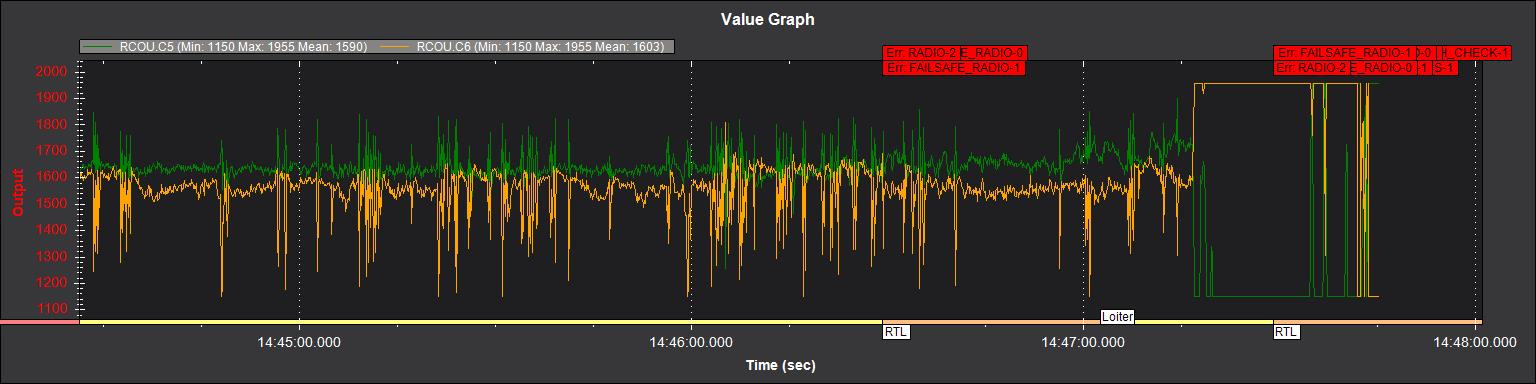
The motors show pronounced pulsing right from the start of the flight with motor 6 being virtually shut down quite a lot.
The FC probably could handle a motor out in normal conditions when well tuned.
Your copter is overtuned, just too twitchy (technical term
The FC did a good job keeping it all together for as long as it did.
 before the incident, you were at ~44 % thrust, then remove one motor due to lack of thrust , and equvalent of another one for yaw countering, then remember the AP does not know exactly which is at fault, and scales all thrust proportionally by motor position, not it’s status -
before the incident, you were at ~44 % thrust, then remove one motor due to lack of thrust , and equvalent of another one for yaw countering, then remember the AP does not know exactly which is at fault, and scales all thrust proportionally by motor position, not it’s status -