Sorry, only just saw this…
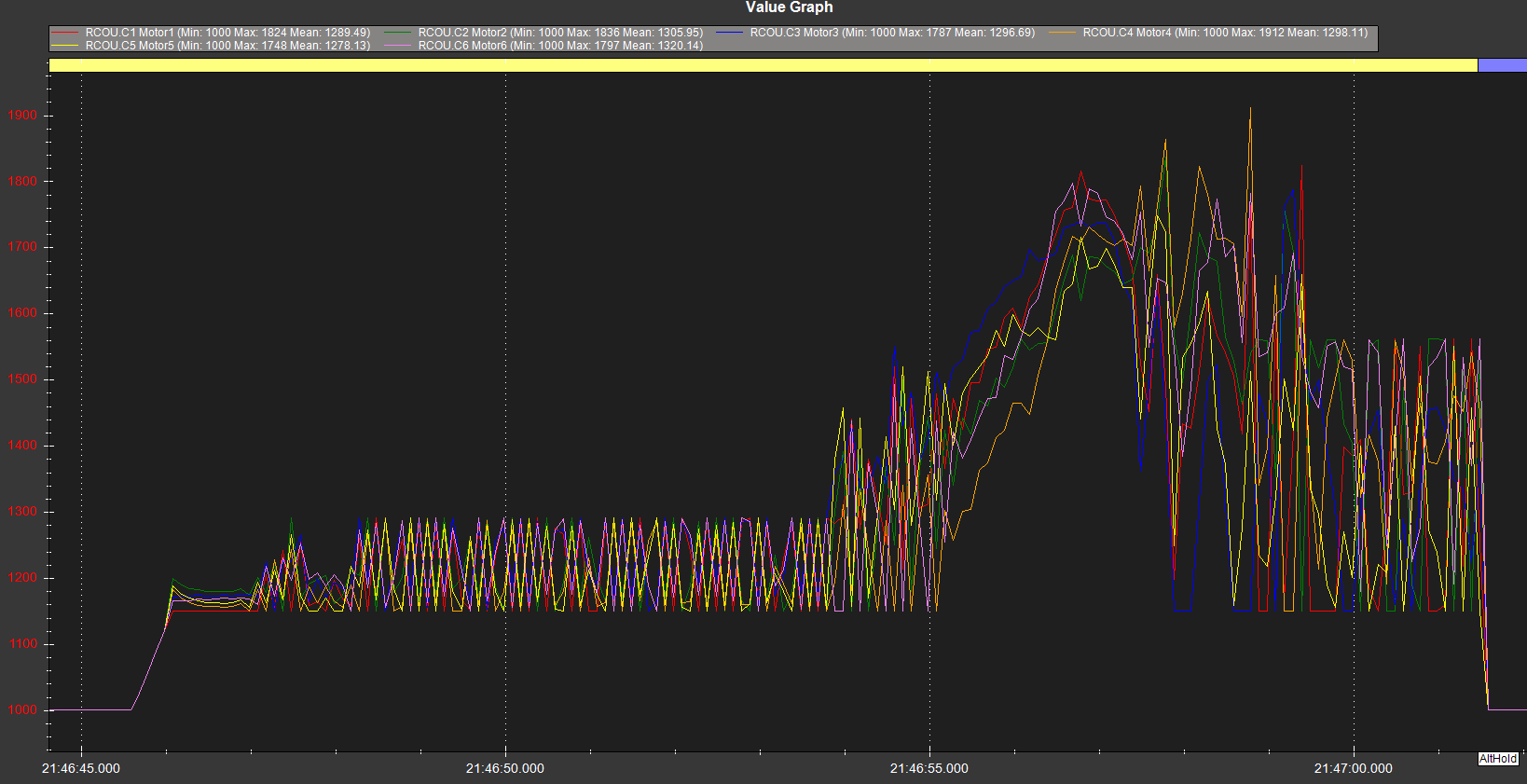
Looks like your motor outputs are oscillating a lot even before takeoff. Could be a sign of bad tune, flexible frame or landing gear. It could just be because of some resonance with the payload and sloshing.
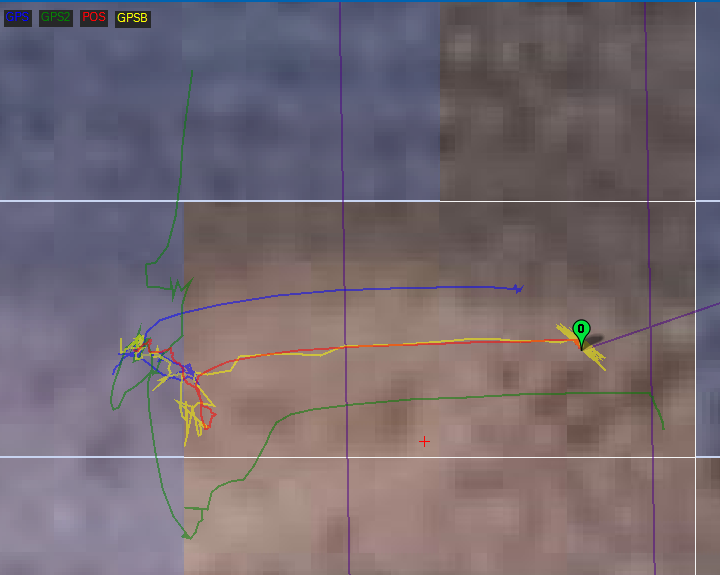
On the map you can see GPS positions and IMU position (red) never agree and there is quite a bit of wandering. The blended position almost agrees, but not well enough in the end. I think that caused the crash since you arm and take off in Loiter and the craft is trying to move before landing gear even leaves the ground.
Set FENCE_ENABLE,1
The Fence setting will prevent you from arming in ANY flight mode until there’s a good GPS 3D fix and Home can be set. Check the altitude and radius, you could even set the polygon to suit jobs. This would likely have prevented your accident.
You do have to wait for some time, but you get used to it and it’s worth it compared to the price of broken props or worse.
This thing is too big to be taking chances with.
I would definitely set these BATT parameters
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
Check your GPS_GNSS_MODE and GPS_GNSS_MODE2 params, probably a value of 65 would work well for your region. You will see the difference in GPA Delta in logs, the update rate. It should be steady at 200ms. Reducing the number of constellations in this way eases the load on the GPS unit and can often allow a quicker fix and even improved accuracy.
You can set INS_HNTC2_ENABLE,0 since it is essentially disabled by INS_HNTC2_REF,0 and it’s doing nothing.
You probably should lower FFT_MINHZ,80 down to around 40
You can safely set these:
PSC_ACCZ_I,0.512
PSC_ACCZ_P,0.256
ATC_THR_MIX_MAN,0.5