Hi all,
During the past few days we’ve conducted several test flights to assess ArduPilot’s ability to maintain level flight in the event of a motor loss.
Based on our experiments so far, the drone (hexacopter) will maintain level flight and control when losing any of the CW motors, but will lose yaw and enter a ‘swirl’ when losing any of the CCW motors.
(It’s a bit hard to notice in this video, but in this video we’re shutting down one of the CW motors, and the drone maintains flight very nicely. We’re also able to land and control it relatively well despite the motor loss).
In this video, we’re shutting down motor #5, you can see that the drone will start losing yaw control, and gradually enters a swirl. We then power back motor #5 simply to avoid crashing the vehicle.
(We did a separate test without recovering the motor to make sure it’s not a matter of timing… the vehicle will indeed crash …).
Looking at these videos I’m somewhat puzzled why a CW motor loss is able to maintain flight so nicely, while CCW will fail. I would assume the motors have enough thrust since it still maintains flight with a CW loss, and therefore this is most likely either an algorithm issue, or, PIDs that needs further calibration?
Any input will be very much appreciated.
*I can also post the full flight logs for each of these flights if this can help.
Hi @ardu_clog
its hard to say with uploaded videos , please upload log file.
but in your second videos i can see a little bit oscillation before shutting down motor #5 , so maybe your PIDs are aggressive and as @Mallikarjun_SE said physically balance is very important in this situation.
also some CCW propellers generate less thrust than CW propellers , did you tested this ?
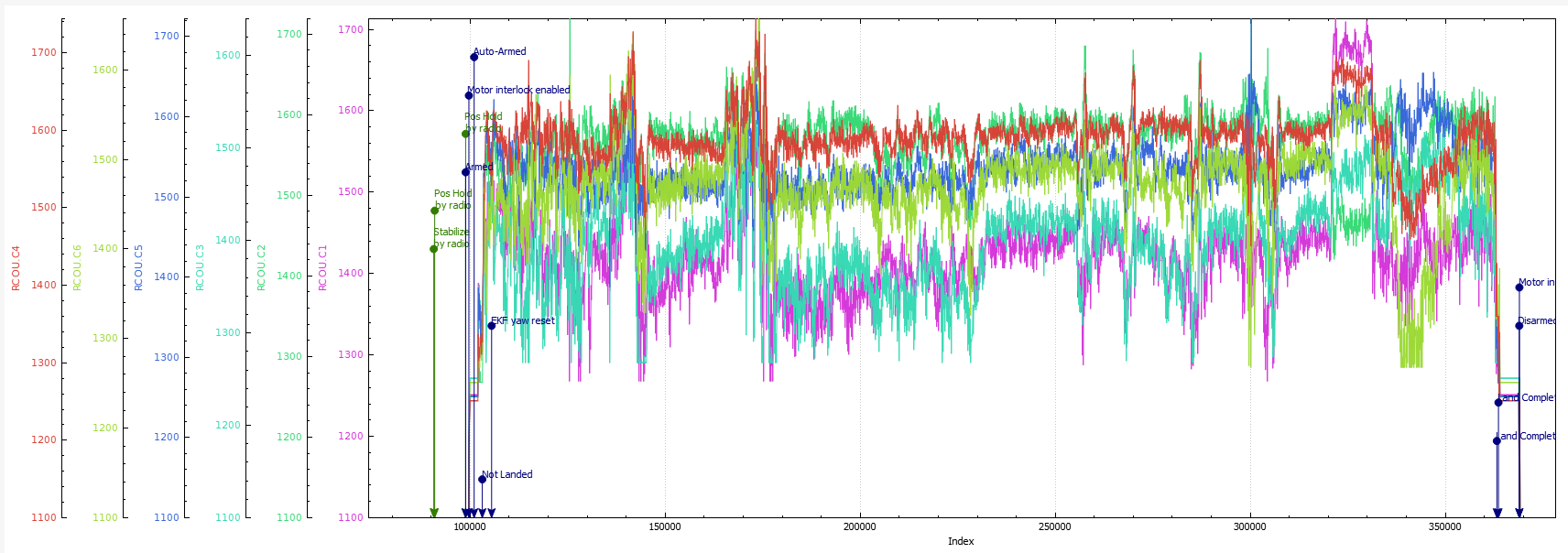
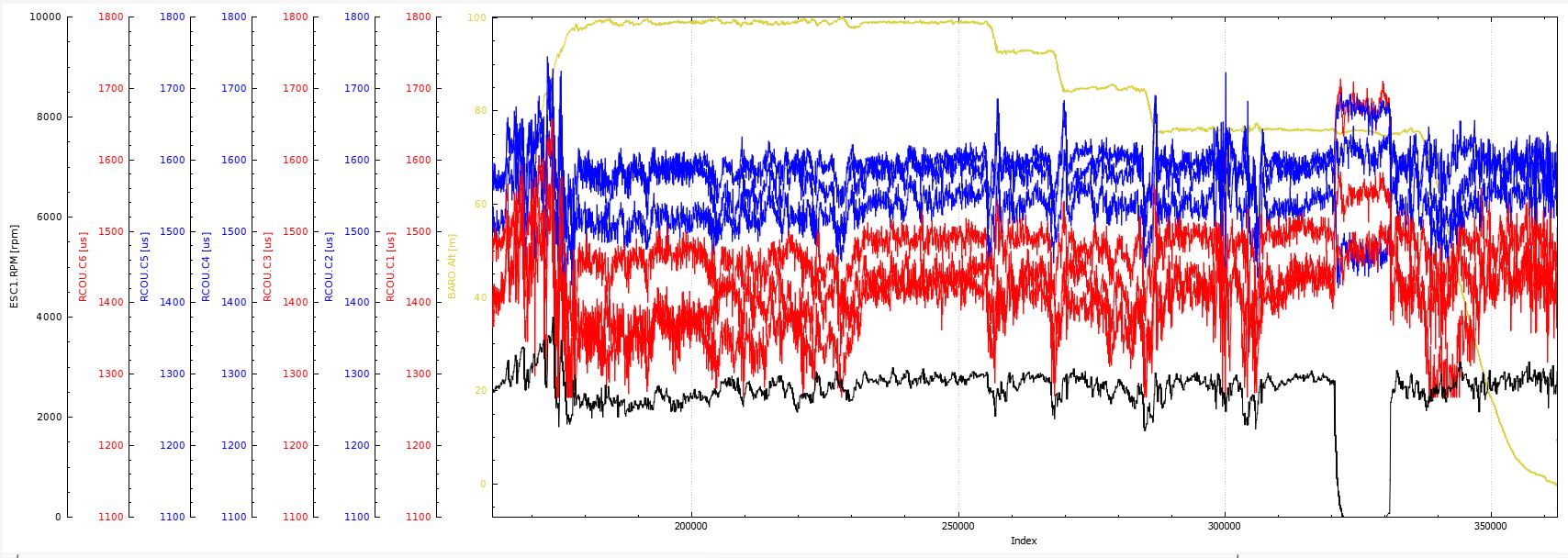
I agree with Hosein. Your craft has a large yaw bias with all motors running and no Yaw command. This is usually from motors/props not level., twisted arms, twisted frame etc. Fix that and I suppose you will have equal authority whether a CW or CCW motor drops out.
CW and CCW motors shown in red and blue for effect but it’s essentially the same as Hosein is showing:
This is a really common issue for custom made frames and even other frames that come ready to assemble… It requires balancing the copter on X and Y axis and motor alignment… I have noticed this is a much lesser an issue on frames where the motor arms are angled towards center gravity (forgot the actual name for this, dyhedral?), like an s550
 …).
…).