Hi, my name is Henry I started in this world, now build a hexa, and I have the following doubt, this one behaves miy well in flight, does not present problems at any time, the doubt is generated when I check the logs, when verifying the height of flight at the time it touches the ground presents a distortion in the reading, showing as it is at 15 meters, checking other data, all the same happens, in the barometer, sound, and other readings, all show a distortion, which is not reflected in the moment of landing. I have the feeling that the problem is electric, but I have not been able to find anything yet, I hope they can apollar me. greetings from Chile.
Hola Henry,
Can you upload a link to a log?


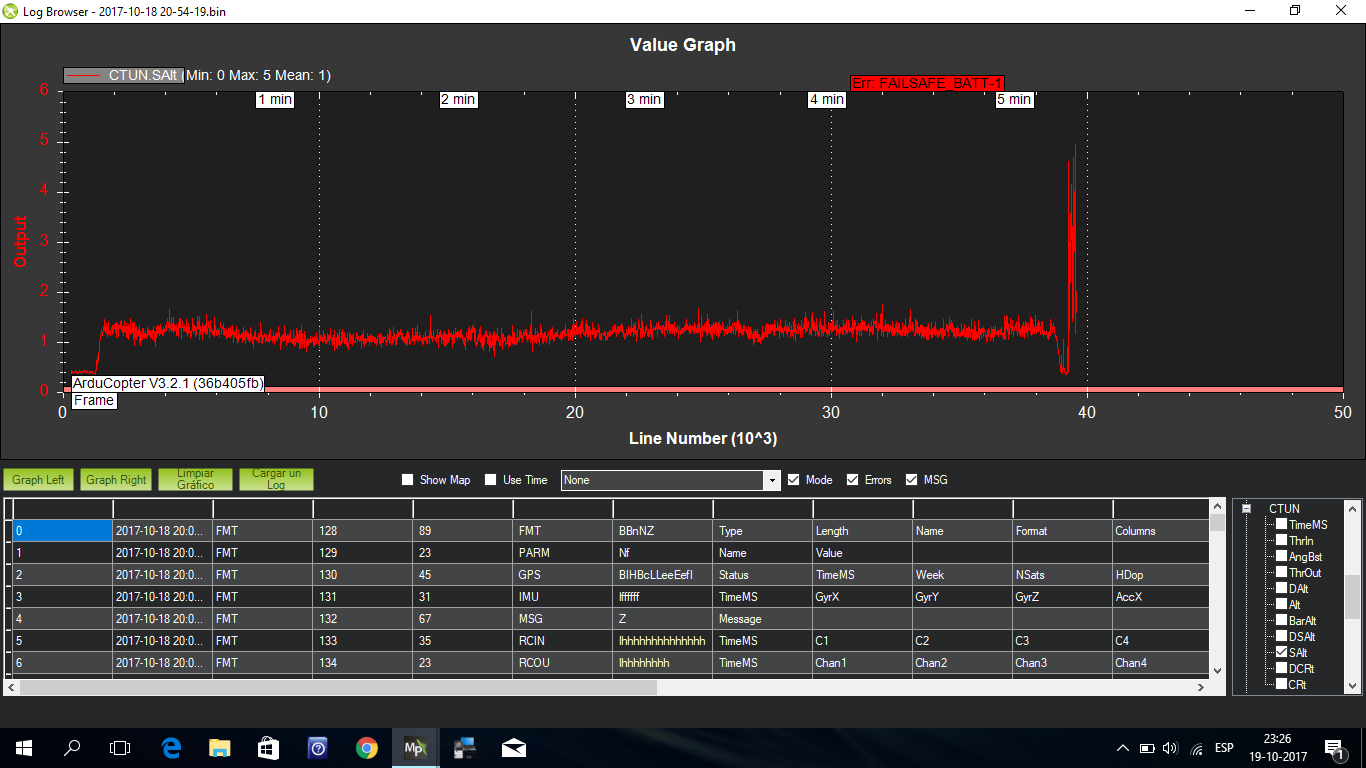
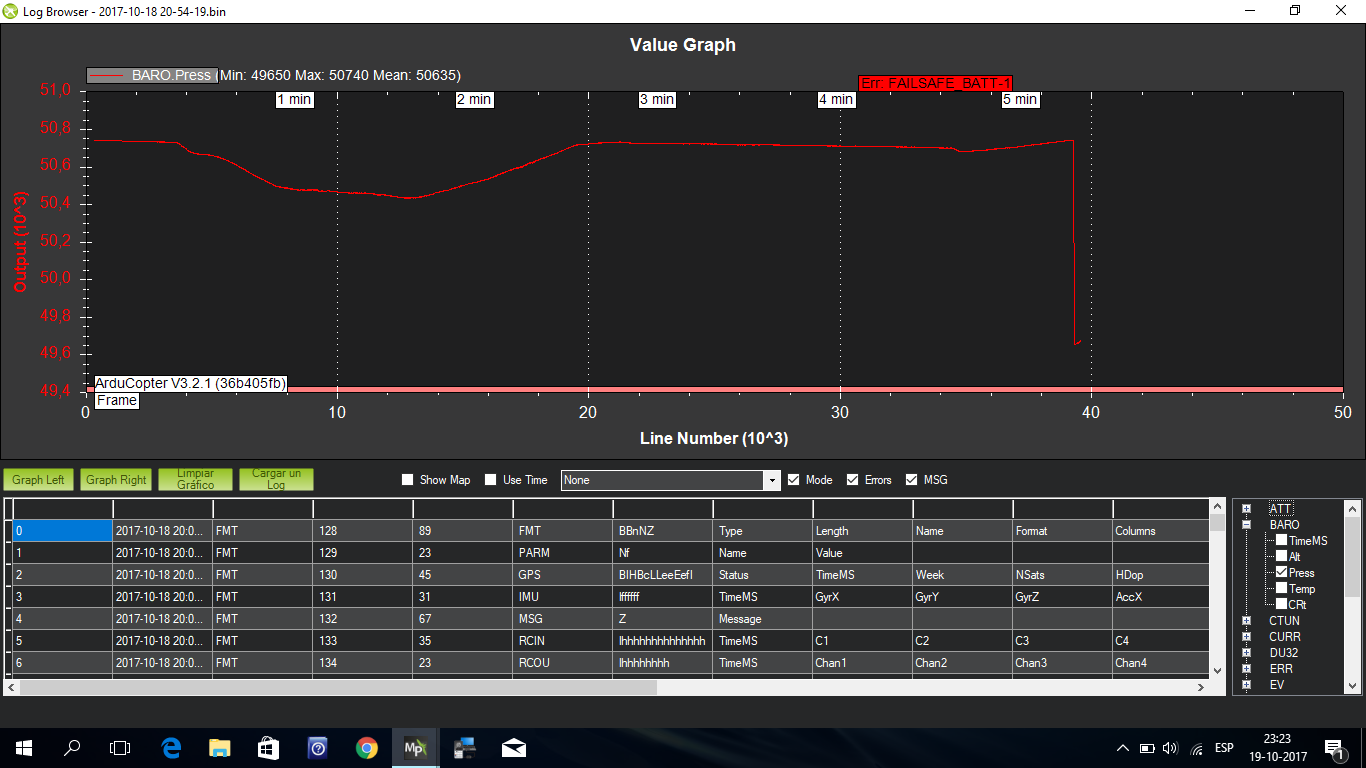

Really hard to analysise without much information, but I’d guess you have a lidar or sonar, and the sensor is swamping as it descends. Changing the minimum altitude for the rangefinder (depending on rangefinder type) through params might be something you can look at.
Ok, regarding the sonar I will try, later subile the link of the log, the strange thing is that initially did not have this problem, after having a time the Hexa, pass to a quad and generated the same problem, then return to the hex and the problem persisted, for both of them use the same hardware. Thanks for the help.