Hello,
I had some luck exploring another SD card. Here is the log with the inflight motor failure.
Marc
2016-10-02 09-53-17.bin.zip (530.3 KB)
Hello,
I had some luck exploring another SD card. Here is the log with the inflight motor failure.
Marc
2016-10-02 09-53-17.bin.zip (530.3 KB)
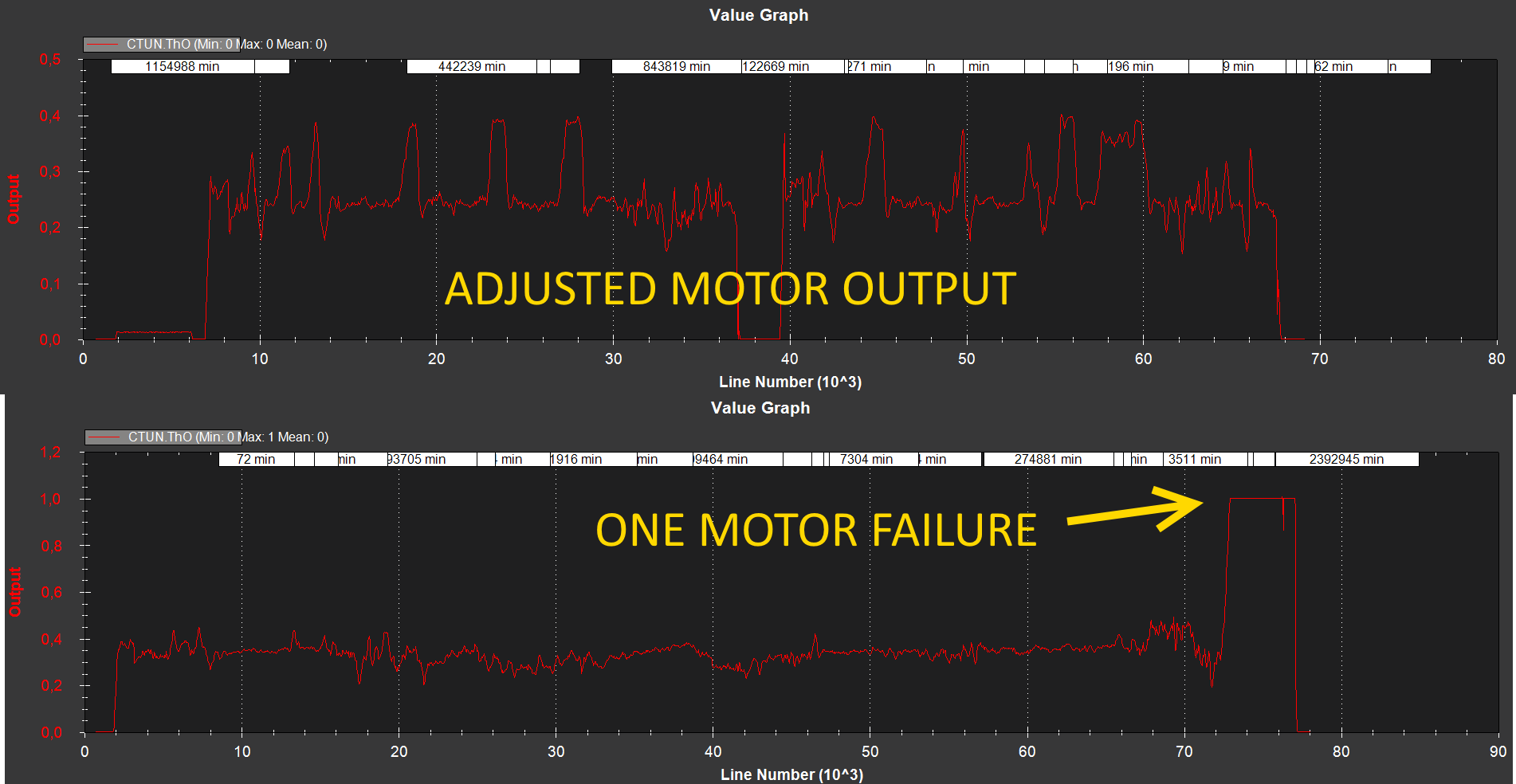
Great job @tabascoz. But still I’m not convinced that this is right way. In your test we can see 2 disabled motors - in our crash situation there was one running(damaged) @100%. I checked my log again and ThO was 1 (maximum), so there is possibility that one damaged motor can cause power output limitation as flight controller is trying maintain attitude.
You can compare your log files (CTUN.ThO), the origin and new one.
Probably this is the bottleneck. Flight controller doesn’t know about failure and it is wasting power on damaged arm. Total motor power output is limited by sw (ThO), bad logic in this case. You need really overpowered hexa for this scenario. Current software implemetation don’t use full hw potential 
Very good insight !
Definatelly a review from the devs would be great. I’m unsure if there is any other layer of control stack that could be tricked by those two powerless arms.
Or maybe it is only the logs that show the real pwm output but inside the AP core it might be outputting 100% of power , just like my previous graph. Randy did the patch and I couldn’t find any word about that.
Thanks , I’m currently traveling in the middle of nowhere ![]() answering through my mobile . I’ll take a look on Tuesday . What I’m searching for is differences from your log / setup to mine that made your flight handle the failure successfully.
answering through my mobile . I’ll take a look on Tuesday . What I’m searching for is differences from your log / setup to mine that made your flight handle the failure successfully.
If your copter is able fly with only 4 motors, you can check it. Remove propeller from controlled motor and turn it on and off during flight. Off should be ok, on not.
How can we contact developers ? I would expect behavior like this is tested and will work 
MOT_THST_HOVER is about 0.16, more powerful than our copters
I believe they check the messages every now and then, therefore I would expect an message.
I’m back home, however I don’t know if I will have time this week to do the other planned tests as I have a job to do with the drone this weekend.
OK, a message from one developer: this issue is tracked in https://github.com/ArduPilot/ardupilot/issues/838 and, although I think it is important, we can’t force someone to work on it; any change necessary is probably known by 3 or 4 people (or less).
If you are looking for better parameters I think that reading that issue can give a good idea of what you need to change.
Thanks Oxinarf,
In any way I meant to force anything nor I am demanding anything. I’m fully aware of how opensouce projects are maintained.
My intention was to raise the issue and contribute. Currently I don’t have time to learn the code and start working on it, however I have equipment, skills and the intention to test it.
Hi Fernando,
Sorry if it come out that way, I know nobody was demanding anything. I just intended to say that very few people in the dev team have the needed knowledge for this and out of those nobody has yet worked on it.
Let me also say that Leonard Hall is probably the most knowledgeable person in this area (inside the dev team) and he recommended that we close the issue, although he later gave some ideas on possible improvements. I think the reasoning behind it is that the most important things are hardware (enough power to keep it in the air) and the parameters set to correct values - I guess we can improve on automatic detection, but it looks like the basic stuff is there already.
That’s OK - my apologize if it looked like I was demanding it.
We could come up with a method to determine if a copter has met the requirements for that. Due to ecalc and a few posts that I’ve read (don’t remember where - probably on diydrones) I used to believe that my drone was able to handle motor failures. It wasn’t. Now, it seems that it is close to it, but @lvcosh raised important considerations about the method I’m testing.
I’m volunteering myself to help writing a wiki page about it, but we should understand well how those variables work ( possible side effects etc) . Since Leonard has closed the issue probably the code is able to handle the failure. If that’s true, so, detection is a plus but the wiki page will be needed.
My guess is the default parameters should work with powerful copters with mot_thst_hover < .20, but It may be possible with tuning to get it working for setups around .30.
Hi Oxinarf,
I appreciate your replies. Can you confirm or disprove my theory about ThO ? Idon’t fully understant what this parameter means.[quote=“OXINARF, post:70, topic:13576”]
I think the reasoning behind it is that the most important things are hardware (enough power to keep it in the air)
[/quote]
I am convinced that our copters have enough power to fly with 4 motors instead 6. Building over powered copters because bad logic in flight controller seems like wasting of power and weight to me :((
Let me just clarify that the issue is open. But, in one detailed post in it, Leonard explained his point of view and recommended it to be closed. That didn’t happen and he has later wrote other posts in it giving more information.
I’m in favor of a wiki page, I just can’t help you with what needs to be there as I don’t have that knowledge.
I can’t confirm it. I’m not exactly disproving it, but from looking at the patch and other code it looks to be the correct change - it is just the last step when writing to a motor that it is changed to 0; all the other math should be the same.
Hi, I did some tests and it looks like that patch to simulate motor failure works as expected. So I will start tune parameters when outside is better weather. Now it is freezing cold in Europe.
@tabascoz if you have some hits, what, how tune parameters, please share. Wiki page is good idea.
Anyway, bottleneck in Th0 persists, AndKe has similar idea.
@lvosh,
Basically I’ve halved all values. I’ve been flying with those new values. Had not have any issue, so, I’m sticking with them. What I like to test is RTL with the failed engine.
For the wiki we should come up with something more precise, ex. defining how much thrust you need to keep flying and setup everything accordingly. I would advise you to try the same values that I have used.
Wanna exchange your freezing cold to something like hell in Rio de Janeiro?  Here thermal sensation is about 45 Celsius. I cannot fly either… Since I mainly have only my weekends to test stuff, I will try those tests only in 21/22 jan.
Here thermal sensation is about 45 Celsius. I cannot fly either… Since I mainly have only my weekends to test stuff, I will try those tests only in 21/22 jan.
Did you ever try to twist the motors 3° to increase the yaw authority ? More yaw control should lead to less imbalance between cw and ccw turning motors and therefore help in keeping altitude, at least this is my wishful thinking.
Yes it should fly with 5. I bet it is a bug in the new programming. Good
luck to you.