Hello,
Thanks for all answers!
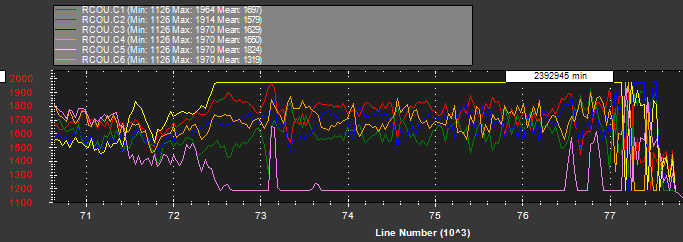
They were around 1600 before the failure, The machine was not well CG balanced when it happend ( I knew it ) because I was flying with two packs and my gopro wasn’t all the way forward. After the failure the overall output has risen to ~1700. I was expecting more will from the arducopter thrust controller to keep it flying.
Sorry for your crash… It looks the same issue… Almost the same values for MOT_THST_HOVER and yaw imax/yaw headroom.
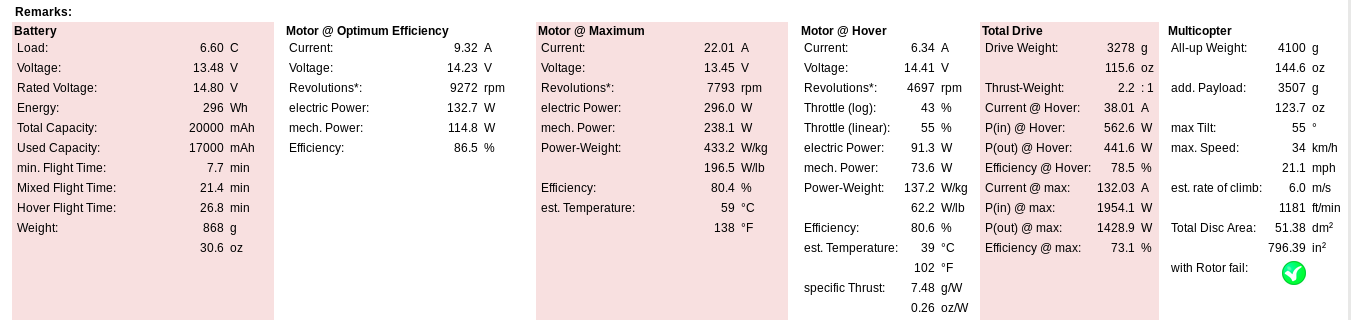
My hex has almost two years and I’ve made dozens of simulations with ecalc. It says that it should be OK. Thanks[quote=“fpvberlin, post:13, topic:13576”]
At first sight it looks like your hex should be able to fly with four motors, given all four motors really develop 1.7 Kgs of thrust. On the other hand, especially max. thrust severely depends on the voltage left at the moment of failure, on voltage changes upon challenge (temperature of the battery!) and on the movement of the uav (steady hover vs. fast descent). If your hex descended after failure, then there was clearly not enough power left, and yaw behaviour could be the result of the FC trying to compensate bank & pitch during descent, which is not easy on a hex frame with four motors, maybe some motors going to max. thrust already, resulting in yaw and tumbeling…
[/quote]
Fpvberlin - I was in a medium speed forward flight before the crash. It almost flipped, but the controller has recovered and managed roll/pitch very well. The batteries are all good, less than 20 flights , two packs of 10ah - 4s. No problems raising all motors to full and drawing ~90A. They were about 80% of charge at time of failure. So I’m almost sure it wasn’t a matter of lack of power. I agree with you that if I have more spare power it would be able to recover. For sure. I haven’t had any damage on the frame but the propellers. However I’m not confident in flying above water anymore.
But as I haven’t seen the four motors left raising the throttle significantly even loosing yaw if it was necessary, I feel that there is still room for tuning/improvement before changing propellers / motors or batteries. I would be very pleased and happy to go down to the bottom of this and figure it out.
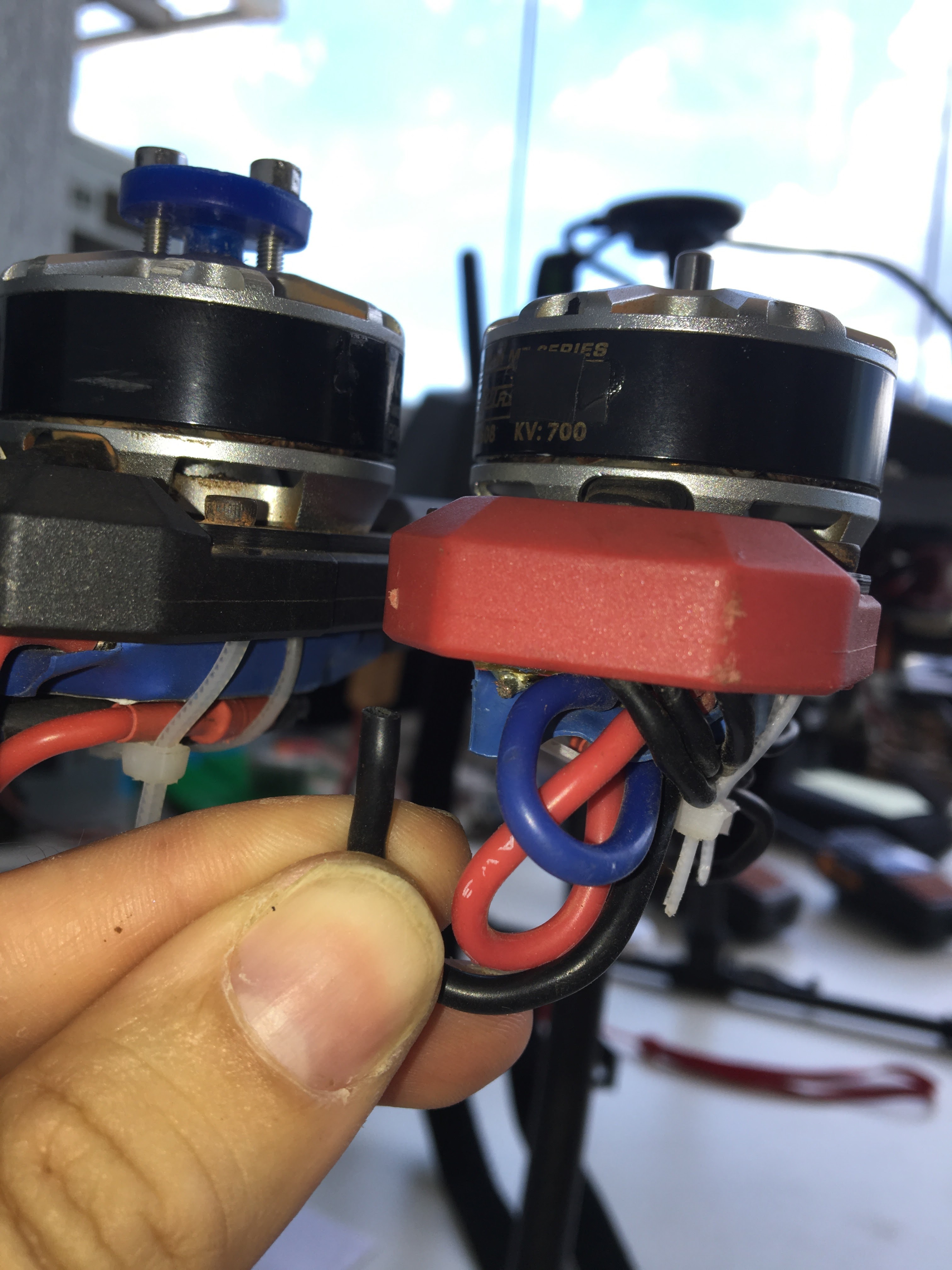
Nice tool. My way of measuring is not nice, but accurate. I held the drone with some negative weight ( pulling it up), secure it with a wire attached to a scale - then calibrate the scale to zero and power the motor up. I’ve measured 1.57 K of thrust. * 4 = ~ 6Kg - enough to lift the drone with 4Kg auw .