And the video from my “crash”, in 0:03 is propeller flying away.
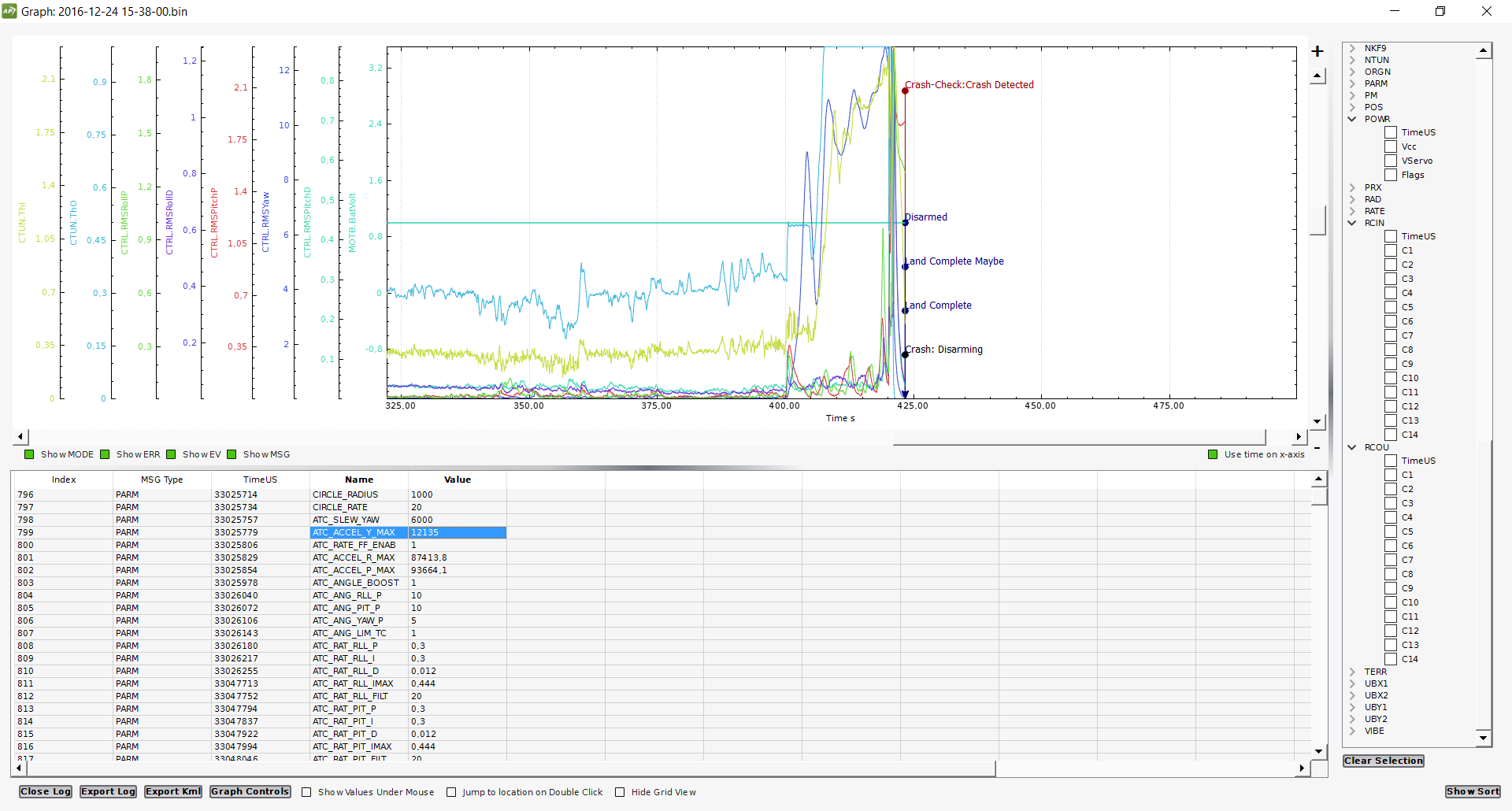
Hi again, I had a brief look at your logs, I don’t see a definite cause, but somehow yaw seems to get too much prioritization over pitch / roll after the prop came off. “Throttle out” goes up to 100%, and while pitch / roll seem to be kept within limits, yaw error goes up… Maybe you can solve your problem by simply giving yaw less priority. Also your yaw p-term seems rather high, at least compared to my own values…
@tabascoz, thanks for the idea to better fix those outboard escs! My last failure was also due to a capacitor breaking loose…
@fpvberlin thanks for your time, it make sense what you found. When I loose propeller, roll/pitch were stabilze really fast, you can see it in video. But yaw axis no so the error goes up. The quetion is why. When it gets lower priority, it will be worse I suppose. In this moment copter needs more power to stabilize yaw.
My idea what could happen: Let say that desired yaw is 0 deg and copter gets to the CW rotation. When there is no enough power to stop the rotation till 180 deg what happen then ? Arducopter speed up rotation and it is trying get to 0 deg from the other side ? But it makes situation again worse. Log file looks like that:
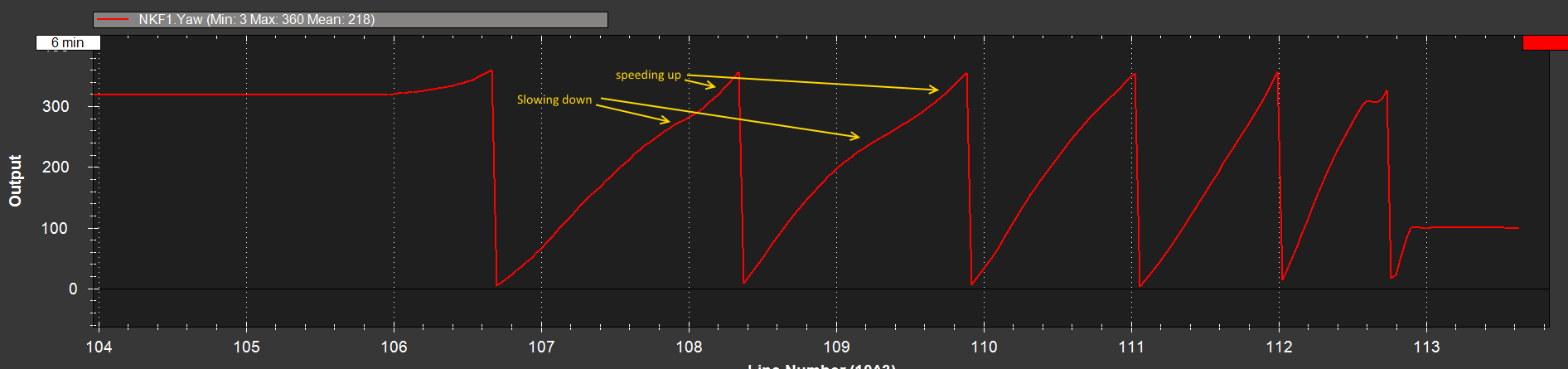
But this is only consequence. Root cause is in low 4 motors output.
EDIT: as I’m thinking about it, maybe I’m wrong and there is nothink like desired yaw 
Here is a video of my hexa crash after a prop break in flight
The hexa auw is 4.2 kilos
After the prop break the hexa contunue it front move like nothing happend ( I was looking at it and i couldn’t understand why it did a big dive in front)
The hexa keep it altitude and begaviour after the prop break , until i did a yaw movement
After this the hexa descent
At my panic i did everything , change to stabillize , full throttle but they told me that i had to give full pitch or full roll to regain the attitude
The damage was minor
The firmware was 3.3.3
Why is this thread marked as it has solution ?
Regarding redundancy, remember that you did not loose thrust from one motor only.
to maintain attitude, opposite motor is commanded to idle (in your case #6),
you can see CTUN.ThO max out as you loose altitude.
It could have been me by mistake ( mobile ). For me to take it as “solved” would be:
- Method / instructions to evaluate HW and tune parameters to increase the chance of recover
- Method to test it ( i’m working on a patch )
I believe this is a matter of safety and therefore it should get some attention from the devs. There are plenty of similar reports as mine.
Andre, OK, the point is why even with ThO maxed the remaining 4 motors had not saturated?
I have ported @rmackay9 's patch to current 3.5dev and successfully compiled it in my gentoo box and uploaded it to the drone. It seems that it is working fine in the bench. I will choose a safe location to test it on the field.
I’m planning to upload the PR to GIT tomorrow as I need to learn how to submit it ( I didn’t have git in my programming days … )
I will start by lowering yaw_headroom to 100 and lowering yaw_imax to 0.1111 - both half default.
The plan is to takeoff, climb to something around 30m height in loiter mode and slowly starting to decrease motor #1 ( front right so I can record it ) and see how it reacts…
If anyone has any idea on how I should perform the tests, and things that might go wrong please let me know!
Great, please do this test also with default values, so we can compare it. I can do some test too if you share firmware, but currently we don’t have good weather for flight…
Just let me test first. The weather is good and I’m charging the battery to give a try. The defaults are the ones that resulted in the crash ( 1st post ). My goal is to try to keep it flying despite yaw etc. If it works, then I’ll try a RTL with 5 motors to check …
No fun with 3.5dev. Could not arm due to “check mag field” message. After two calibration sessions , nothing.
I will recompile the code with current git tag for 3.4.4-rc1 and will try again… I don’t know if I will have another “perfect spot” to test it this week.
Here is the patch : https://github.com/tabascoz/ardupilot/commit/453e7b838a87fa724303e74c60220baa3d260646
Here is the compiled firmware for pixhawk ( px4-v2 ) hexa: https://www.dropbox.com/s/okjhi73mz0r20ay/ArduCopter-v2.px4?dl=0 WARNING - I haven’t tested it!!
using AC3.4.4 stable version, i removed the propeller of motor 4. I armed the ardupilot to take off. The hex take off but fly to the direction of the motor without propeller. Then hit on a tree,broke one leg.
In my opinion ,the motor power is enough,the hex can take off with only 4 motor. You can see the out put of the motor from log

1 Like
the mode used is poshold, yaw_headroom 100 and ATC_RAT_YAW_I to 0.1
Leonard is more the expert but I suspect what we need to do is increase the Rate Roll & Pitch IMAX values. They are already quite high by default, 0.44 but that could be increased to 1.0.
I think the best outcome for most vehicles is going to be the loss of either yaw or altitude control. I don’t think it needs to lose roll/pitch control though.
I’d just like to make sure that everyone realises that, because of the motor setup, a hexacopter with a single bad motor is not equivalent to a quadcopter with an extra motor. You’ll see from the images below that once a motor is lost, the CCW and CW motors end up on the same side of the vehicle unlike with a quad where they are kitty-corner to each other. http://ardupilot.org/copter/docs/connect-escs-and-motors.html#hexa-octo-y6.
1 Like
To use randy’s patch set the following parameters:
Tune to 99 ( to enable ch6 knob)
Tune_high to 1000 ( 100% power )
Tune_low to 0 ( 0 % Power )
Mot_fail_num to 5 - motor channel to be failed ( 5 is front right )
mot_fail_pct to 100 ( 100% failure )
Then if you turn your ch6 knob all the way down it will disable motor 5. All the way up and your motor should be fine with 100% power.
Note that it does not obey mot_pwm_min, so when you set it to 0% it will stop. If you suspect your esc could have a problem to rearm the motor when it is stopped or with the prop running in the opposite direction (it the drone starts to descend), then don’t go all the way down to 0.
I will wait for another perfect spot to test it. Hope tomorrow
I think @tabascoz is on the right track reducing the yaw control parameteres. In particular the yaw-headroom.
I had a look at the video and the logs and it performs reasonably well except that some (all?) pilots may prefer to lose yaw control in order to maintain altitude. One of the two likely had to be sacrificed so pick your poison…
Will try to double that value [quote=“rmackay9, post:35, topic:13576”]
I’d just like to make sure that everyone realises that, because of the motor setup, a hexacopter with a single bad motor is not equivalent to a quadcopter with an extra motor. You’ll see from the images below that once a motor is lost, the CCW and CW motors end up on the same side of the vehicle unlike with a quad where they are kitty-corner to each other. Connect ESCs and Motors — Copter documentation.
[/quote]
Year, got that. When you give up on yaw authority you should rely on a simple mode to bring the copter back, or RTL. That’s my plan. For the reason you explained it is almost sure that you will loose yaw authority.
Sorry for your crash. Have you lost authority on yaw? could you please post the logfile?
Randy, please correct me if I’m wrong! ![]()
2016-12-27 16-24-28.bin (321.1 KB)
Here is my log without propeller of motor 4, using poshold mode to take off.