This hex was upgraded from a 2021 build, and now is having weird issues with maintaining altitude, and compass issues
I also took a hard landing at the end
@dkemxr here is the log file
This hex was upgraded from a 2021 build, and now is having weird issues with maintaining altitude, and compass issues
I also took a hard landing at the end
@dkemxr here is the log file
The Loiter issue is probably because you never had good positional data. Low sat count and high Hdop. A “3D lock” is almost meaningless these days, better positional data is required.
Looks like you need to update a few things and make a simple hover flight in AltHold to check some stuff out:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
MOT_PWM_TYPE,6 (Dshot600 is generally considered most stable)
MOT_SPIN_ARM,0.1 (Review this using setting Motor Ranges) Setting Motor Ranges
MOT_SPIN_MIN,0.15 (ditto)
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
So you installed ArduCopter 4.4.3?
Why did you post on the copter 4.0 section and not on the 4.4?
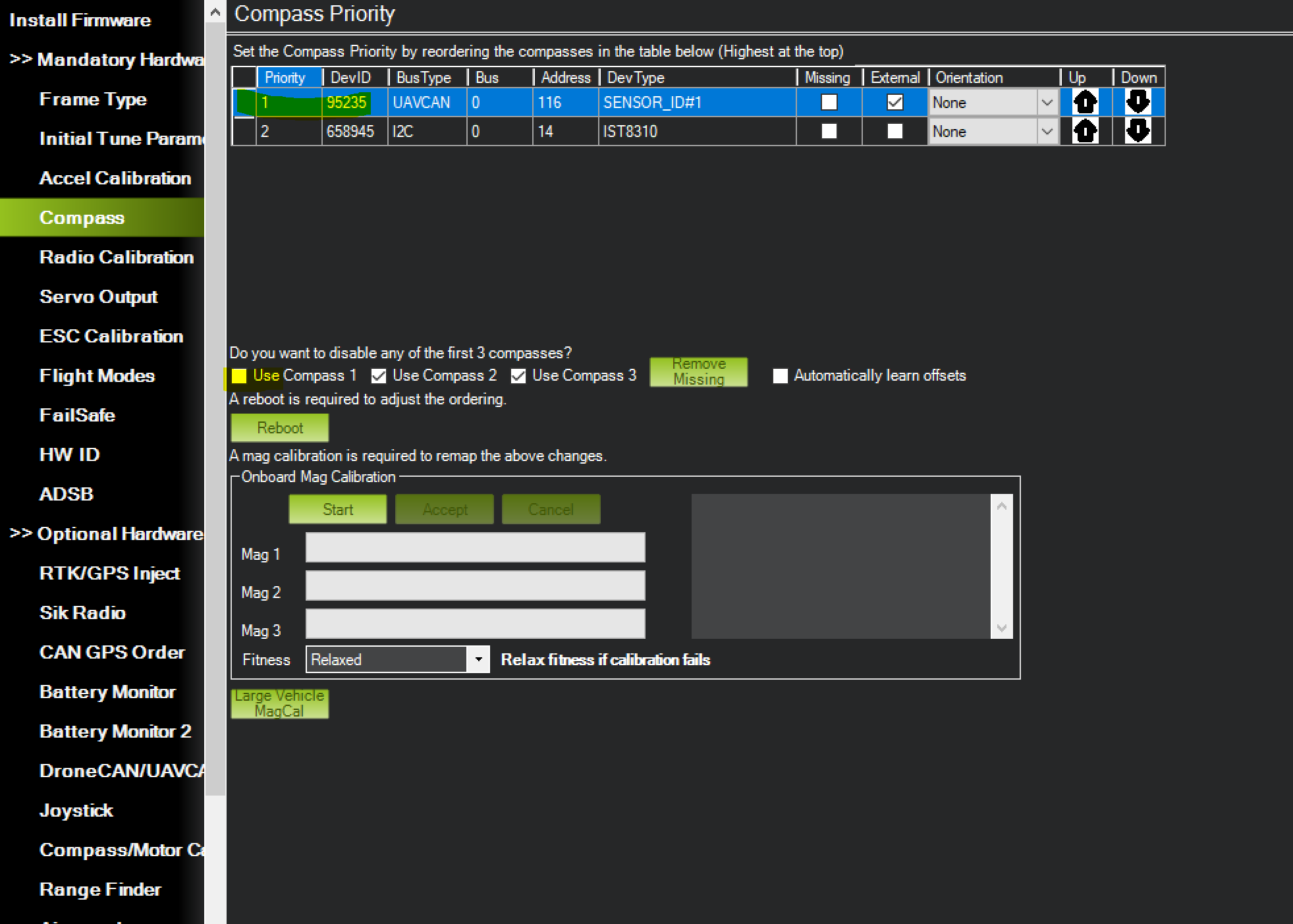
I just removed my Fence, as it was taking forever to get a GPS lock, so not having positional data is not unexpected. I did just find in the config that I am not using the compass on the external GPS
I posted in the wrong section by accident. If someone could move this to the right section that would be appreciated
Yea, oddly you had the priority right but not configured to be used.
I just changed it to be used.
Also I made the changes you suggested, with the exception if the DSHOT – If memory serves me right, I had funky issues with 600, and it was super stable at 150
Anything else look off?
Yea, you should probably be using the Bdshot version of firmware and configure the outputs to use it. The telemetry update rate is waaaay faster which is a better reference for the Notch filter.
Best way to flash it is to downlaod the .apj file from here and use Mission Planners “load custom firmware” to flash it.
Bdshot
I will try that later this evening.
Is that just a firmware optimised for dshot ESCs?
Yes. It sends telemetry back on the ESC signal line (bidirectional Dshot)
Ah ok, currently i have telemetry coming back over a serial connection from all the ESCs
Yes, saw that. You can still use that but we would typically reduce the update frequency as RPM data will be from Bdshot at the ESC update rate. After flashing the Bdshot firmware and enabling the outputs temporarily disable the serial ESC telemetry as a check to make sure you have RPM data in the log from Bdshot. The you can re-enable it.
Page down here for some parameters for Bdshot you will have to set:
Bdshot params