I’d like to use HereFlow for indoor fly, but I’d like to use it pointing to the roof of my indoor place. In the wiki it’s say
The flow sensor should be mounted on the underside of the copter with the camera lens pointing downwards. The side of the sensor with the lens should be towards the front of the vehicle.
So I guess the config is done in the source code, my question is can I use it pointing to the top and not downwards, should I modify source code ? OpticalFlow libraries ?
And I’d like to use another Lidar, so I guess this is ok because we already have RNGFNDX_ORIENT param with 24 for top
Ok so I don’t know if anyone can help me or guide me just to know if I’ve understand well whant I nedd to change to use hereflow pointing to roof.
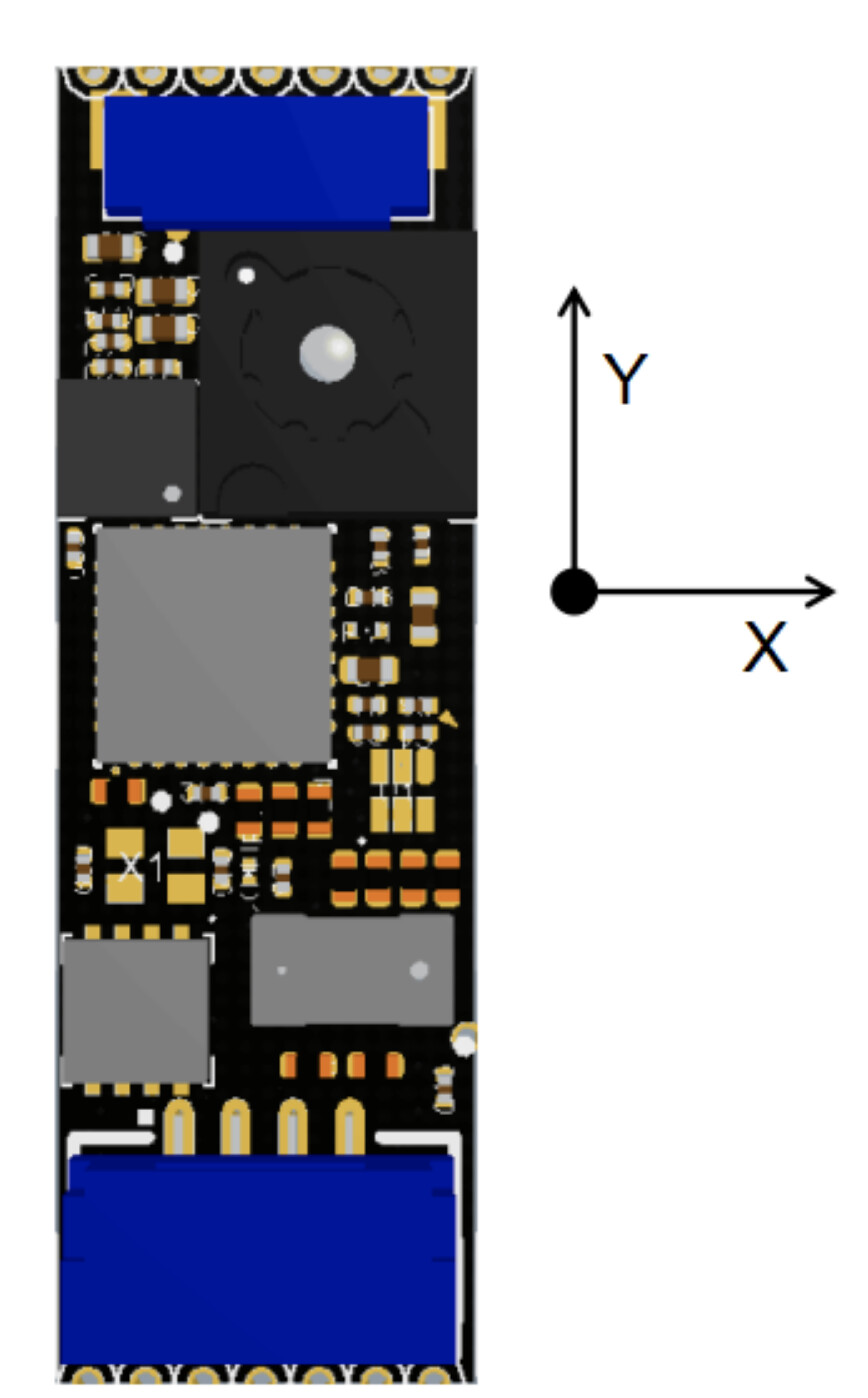
For me the only modification to be made is on the Y/Z axis if I returned the HereFlow, that’s right?
So the idea will be to create a new PARAMhere (like an AP_Int8) and with this param reversed Y and Z value here in flowRate and bodyRate vector
Am I on the right way?
So I’m little bit confused about hereflow and the cube axis if I follow the base configuration
The flow sensor should be mounted on the underside of the copter with the camera lens pointing downwards. The side of the sensor with the lens should be towards the front of the vehicle.
if I’m right the coordinate system does not match at all, the coordinates of the hereflow and the cube must be the same, right? Or there is a conversion in the source code ?