Hello, I’m trying to set up a dual Here3 GPS setup on CubeOrange. I have a Here 3+ and a Here 3 GPS. Both work fine when connected individually to the CAN port. The issue arises when I try the dual setup. I have put the Here 3+ on the CAN port, and the Here 3 on the I2C port. I set GPS_TYPE = 9, and GPS_TYPE2 = 1 (auto). The CAN port GPS gives a reading, but the I2C port does not. ( i flipped the switch inside the GPS) Is this a bug where the I2C devices are disabled when CAN bus is enabled? I also tried changing the I2C connection to a serial connection, by modifying the wires connected inside the GPS and connecting it to the Serial 4 port. Still nothing. With the UART connection, the GPS refuses to even light up.
Is there any solution for this? My next try is going to be to make the Here 3+ I2C, and the Here 3 CAN and see if that works.
You can’t arbitrarily connect CAN hardware to an I2C port or UART and expect it to work. They are all entirely separate hardware protocols and 100% incompatible with one another (even if the connector fits).
CubePilot’s recommendation for running two Here3 modules on a Cube autopilot is to use both CAN ports, as outlined in their documentation under “Using two Here 3 / Here 3+:Using two Here 3 / Here 3+”:
Here 3 Manual - CubePilot
Thank you for your reply. I understand that the UART might not work, but the Here 3 has a switch inside it to switch between CAN and I2C protocols. As long as that hasn’t been deprecated, it should work in I2C atleast right? The GPS flashes when connected to the I2C port, showing that it has been detected by the firmware, there’s just no data.
Ah ok. I’m reasonably sure that the switch is there for debugging or future use. I don’t think autopilot connection is supported in that way. At a minimum, it is not mentioned at all in the manual.
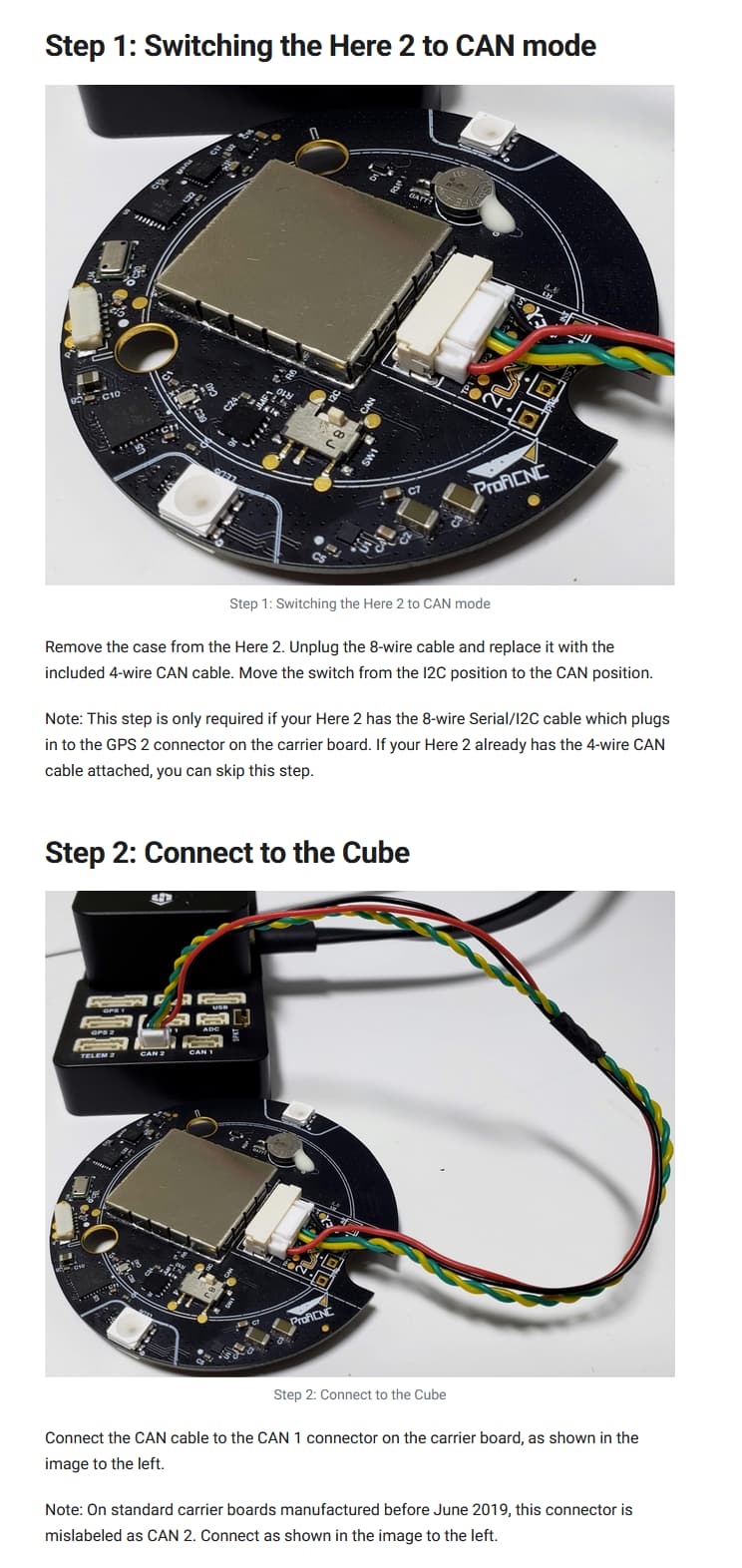
just incase anyone runs into this same issue, its actually a here 2 , it turns out you can switch it, but you have to use i2c and a uart not just i2c