I wish i could give more information than my title. About all i have is this error.
Here is what seems to be ok.
I have a “fixed RTK solution”. It does take a while and I am not sure why when I am placing the base over a HIGHLY accurate surveyed point and I use the lat/long/elevation in the RTK config window and hit “use”. Solutions says it is fixed and using it in the window. BUT then i go to flight data and it is not fixed.
Once it does fix, i get the “GPS and AHRS Differ” error and it will not let me arm. I looked hard in the forum before posting and I don’t’ see much on this error. I hope someone has a solution.
So, two questions:
Why does it take so long to fix? Isn’t this dual frequency? That should solve the integer ambiguity pretty quickly. The configuration window indicates it si fixed, while flight data does not
Are you sure you are injecting corrections? How fast is your data link for corrections? What is your datalink for RTK corrections ? Is the GPS antenna away from interference sources? photos? AFAIK this is not dual frequency.
@amilcarlucas thank you for being interested… i’ll check all those settings and post. Also, thank for letting me know this is single frequency. Not sure where I got the dual frequency idea. HA! probably wishful thinking.
Thanks again for your interest. I have hooked up directly to the HERE+ using ublox ucenter and to mission planner.
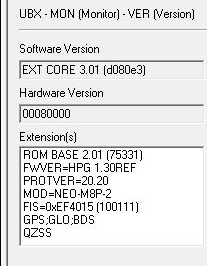
First thing I noticed is that I am one generation of firmware behind. If I am reading this correctly, I have v1.3 and I think 1.4 is available. I’m guessing you would recommend updating.
NOTE: Today I am using this indoors and next to some big windows because of rain… So I don’t expect to get good results. I am just doing this to see if I need to do things like update and check the settings you mentioned above.
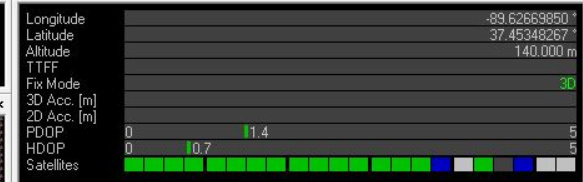
Here is the status view from ublox ucenter before I swtich over. Sort of a shame i can’t monitor this from ucenter AND Mission Planner at the same time, but they dont’ seem to want to share the usb com port.
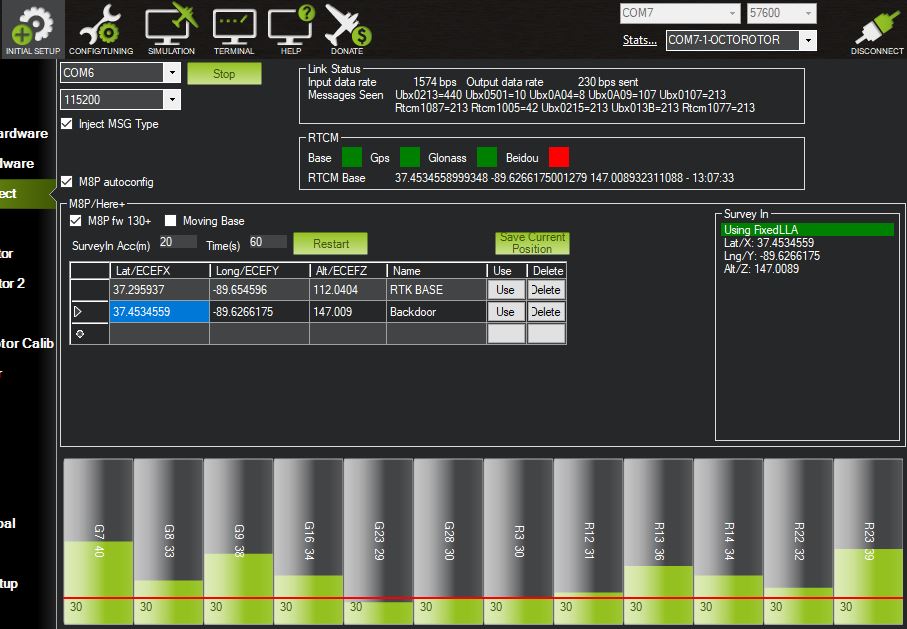
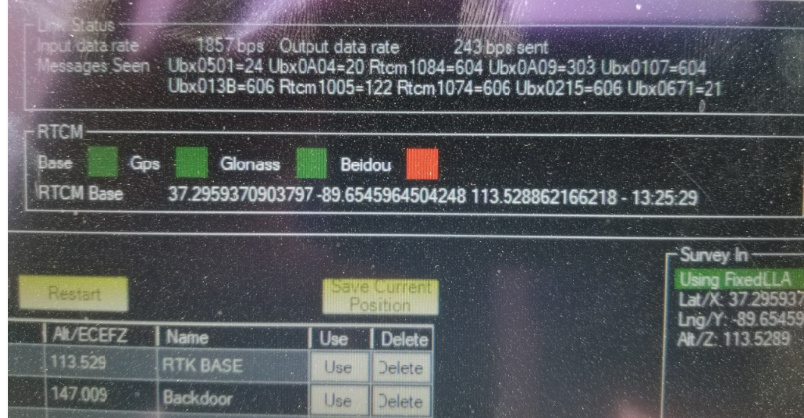
After I switch over to Mission Planners. this is what I have
I believe i am “injecting” And my link status ofr input data is 1574 bps. 230 bps for output. I’m not sure which one of those is considered the “RTK corrections”.
How does this look? At least for possibilities when i am able to move outside.
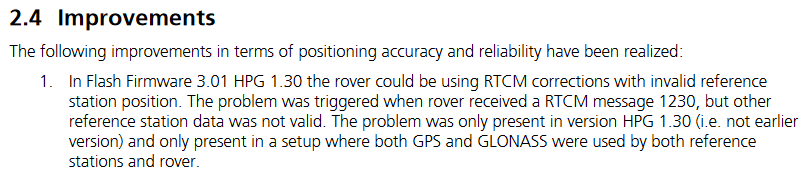
Says it was ONLY a problem in v 1.3 I guess i’m going to do a complete firmware update just to eliminate that as a potential problem. An “incorrect” correction could sound a bit like a problem between “GPS and AHRS”. If something was getting reported incorrectly, some “check” might say “hey, we don’t’ really agree”.
At least on my FIRST test since the firmware, I did NOT get the “GPS and AHRS Differ” and was able to disarm. I hope this was the problem. Any further advice on setting would be appreciated.
Be aware that L1 only RTK is more susceptible to multipath and are less stable than L1/L2… (multi frequency) GNSS RTK solutions as there is no capacity to assess frequency attenuation due to atmospheric conditions through the ionosphere. As a result L1 only RTK solutions will take longer to obtain RTK Fix and will constantly lose RTK Fix. This will happen simply by walking past the base or rover antennas or tilting the antennas slightly.
Thanks @Scriffo Knowing that L1 is “flaky” I was pleased to find out that uBlox has a service called “Assist Now” that tries to get a handle on atmospheric conditions by downloading information from nearby GNSS stations. I don’t think I could be in a better location to avoid multipath. Check out this photo. I placed it on a tripod much like i do with m “fancy” Trimble R10.
I think one thing that does not make sense is that the solution shows “fixed” in the RTK configure windows, but STILL NOT FIXED in the flight data window. How can it be fixed in one and not the other. it is either “fixed or not”. Possibly the configure window is simply describing that it understands that I have given it a surveyed coordinate. Does anyone know? @amilcarlucas
Oh, I also still got the error “GPS and AHRS Differ”, but not very often. It actually said it they differed by 30 meters. I would think that has to be before the solution is “fixed”. But it was after i gave it the surveyed coordinate and had indicated “fixed” in the config window. Even L1 shouldn’t be that far off at that point.
We had something simular to this in earlier versions of firmware when integrating Septentrio AsterX-m UAS L1/L2 GNSS module. it ended up being a problem with the early adoption of the EKF filters and their mixing. The board was getting Fix, and we were getting AHRS errors and also even when the copter got GPS lock (not RTK) it would not take off as some how the EKF was not stable enough so.
So you might need someone who understands how EKF is handling the input and mixing it. There may need to be some smoothing/filtering parameters changed.
 About all i have is this error.
About all i have is this error.