I’m using a HERE3 + BlackCube (with mini carrier board) + 4.1.0 and i’m always getting this:
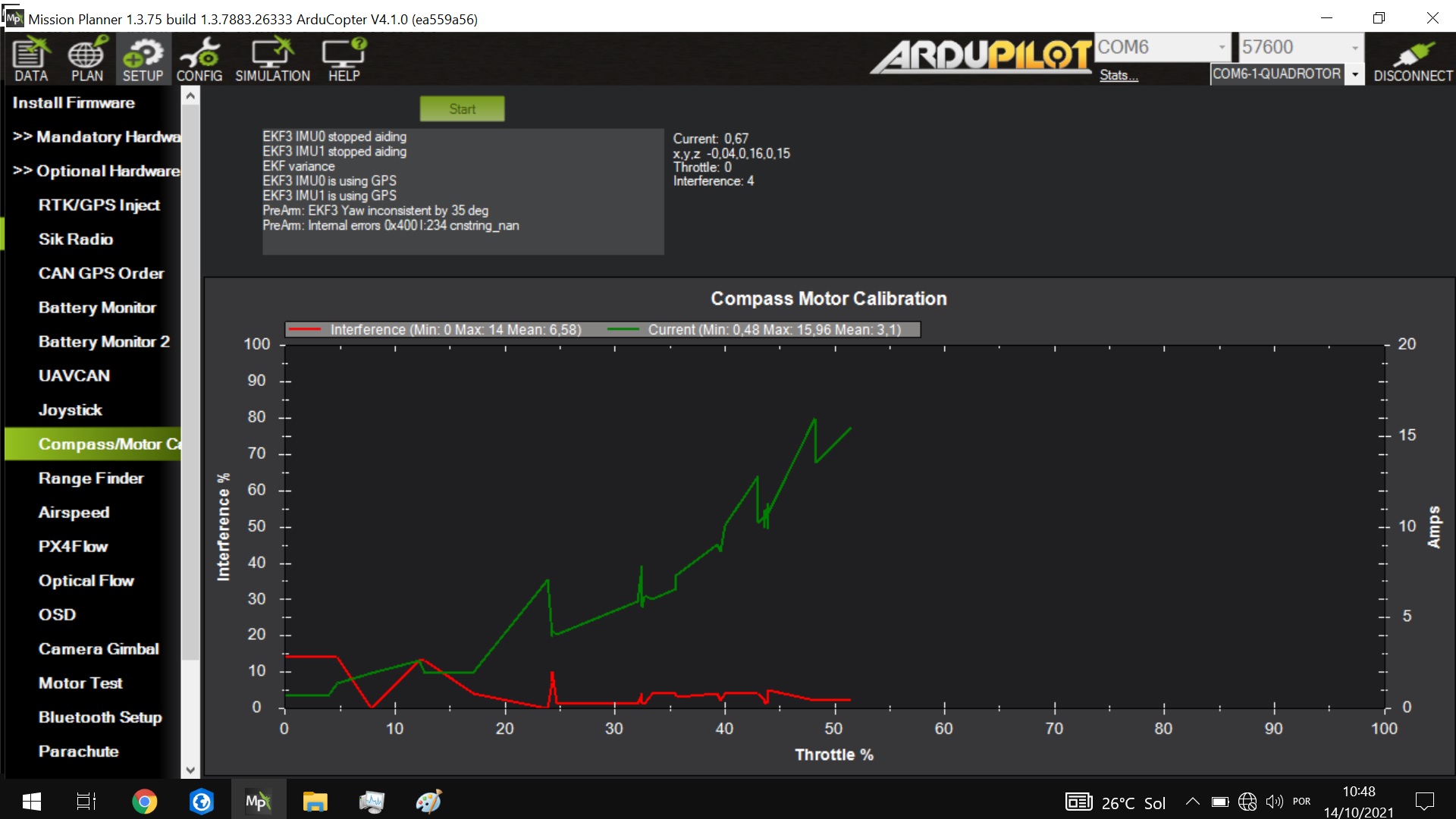
‘‘Test: Compass = FAIL - WARN: Large compass offset params (X:-95.43, Y:-147.41, Z:406.45)
FAIL: Large compass offset in MAG data (X:-251.00, Y:-471.00, Z:97.00)
mag_field interference within limits (20.46%)’’
Already did calibrations (multiple ones outsideand the result is ALWAYS the same in the Z).
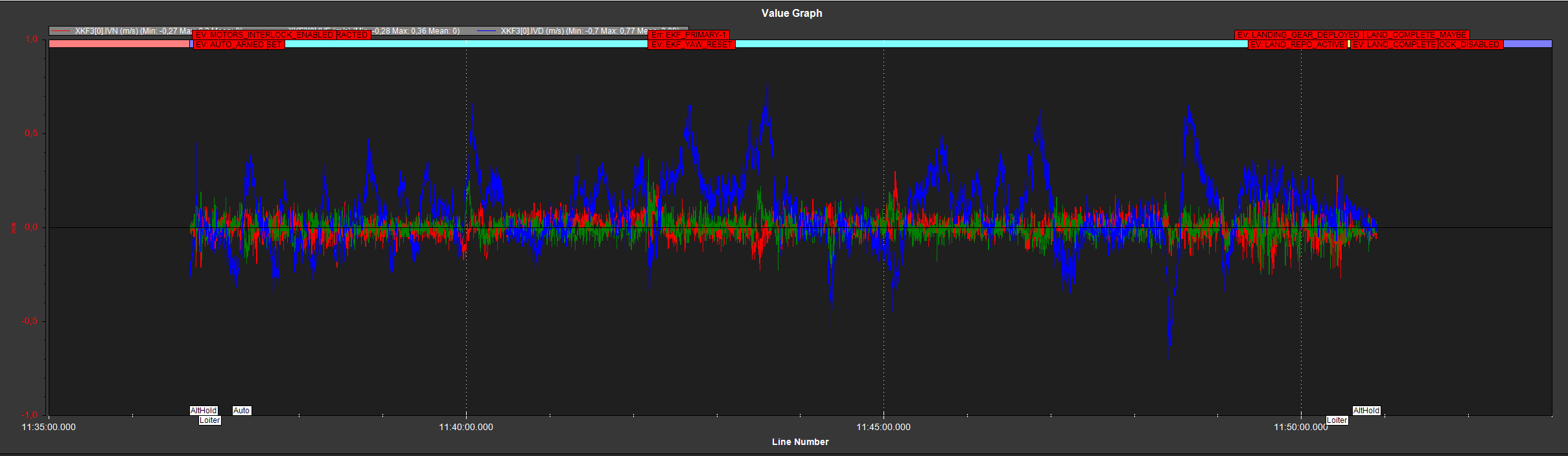
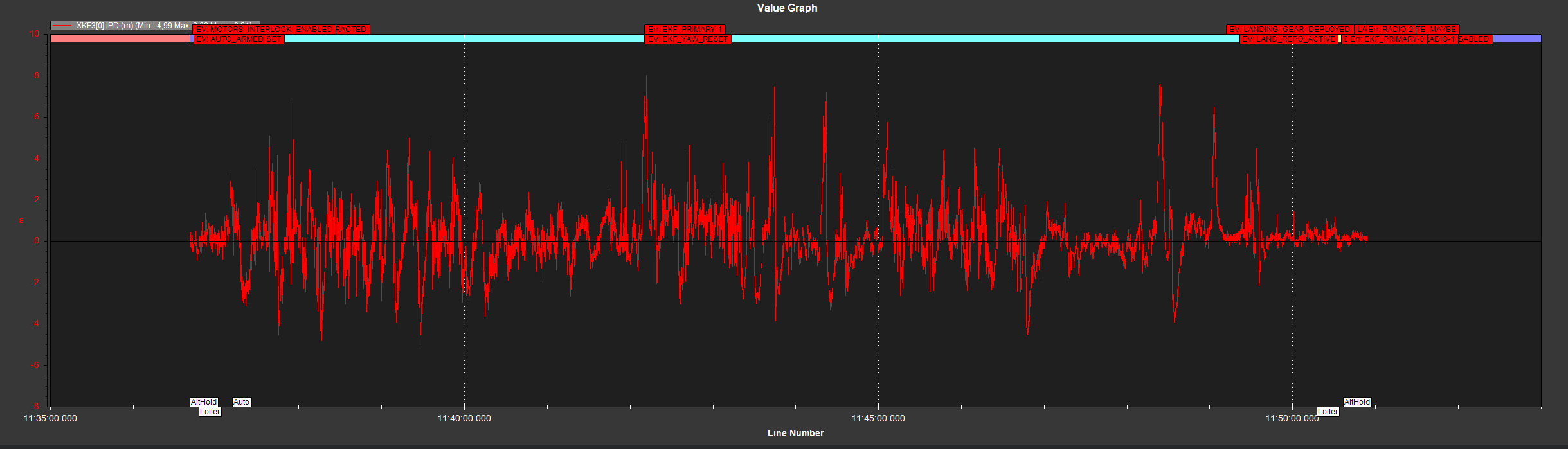
In flight i must say too that even with the ‘high offsets’ the quad flies very, very good (althold, loiter, auto).
Nothing much wrong but you have Rate Roll FLTT at 20Hz with FLTD at 10Hz. I suspect you forgot to update that parameter as the Pitch filters are at 10Hz. It could explain the difference in the Rate Pitch/Roll P&I’s. Unless there is some mechanical reason why pitch and roll would be different these are usually close to the same. But it could be because you lowered Auto Tune aggression from default. You typically want to use default (.1) on this size craft. If you are going to try another Auto Tune it wouldn’t hurt to configure the Dynamic Notch Filter 1st.
But even the largest craft you want to use the default aggression. If you want to read if from the Master he’s talking here about a large craft. Page down to Auto Tune. Tuning
This filter is there to reduce noise coming through the EKF attitude estimate. There is the noise you see in your rate loops and the bias updates. As the EKF does not use the gyro filter it is effectivly unfiltered other than the nessisary intergrator to go from rate to angle. Generally this noise is smaller than peoples rate noise but on very nicely setup aircraft this becomes signiricant. So generally the impact of the FLTT filter is not significant.
So yes, this is a safe thing to do.
Definatly do this. You have a flying aircraft. Just do a 2 minute hover in loiter with pretty much no input in anything other than throttle with batch logging and you will get a good data set for your Harmonic Notch filter settings.
Yes, 10% is the right choice for pretty much all aircraft. An aircraft needs to be very low noise for anything below 5% to even be succsessful. The 10% is the overshoot pluss noise. And you want between 5% and 10% overshoot for the best disturbance rejection. So there is rarly any reason to change the aggressivness.