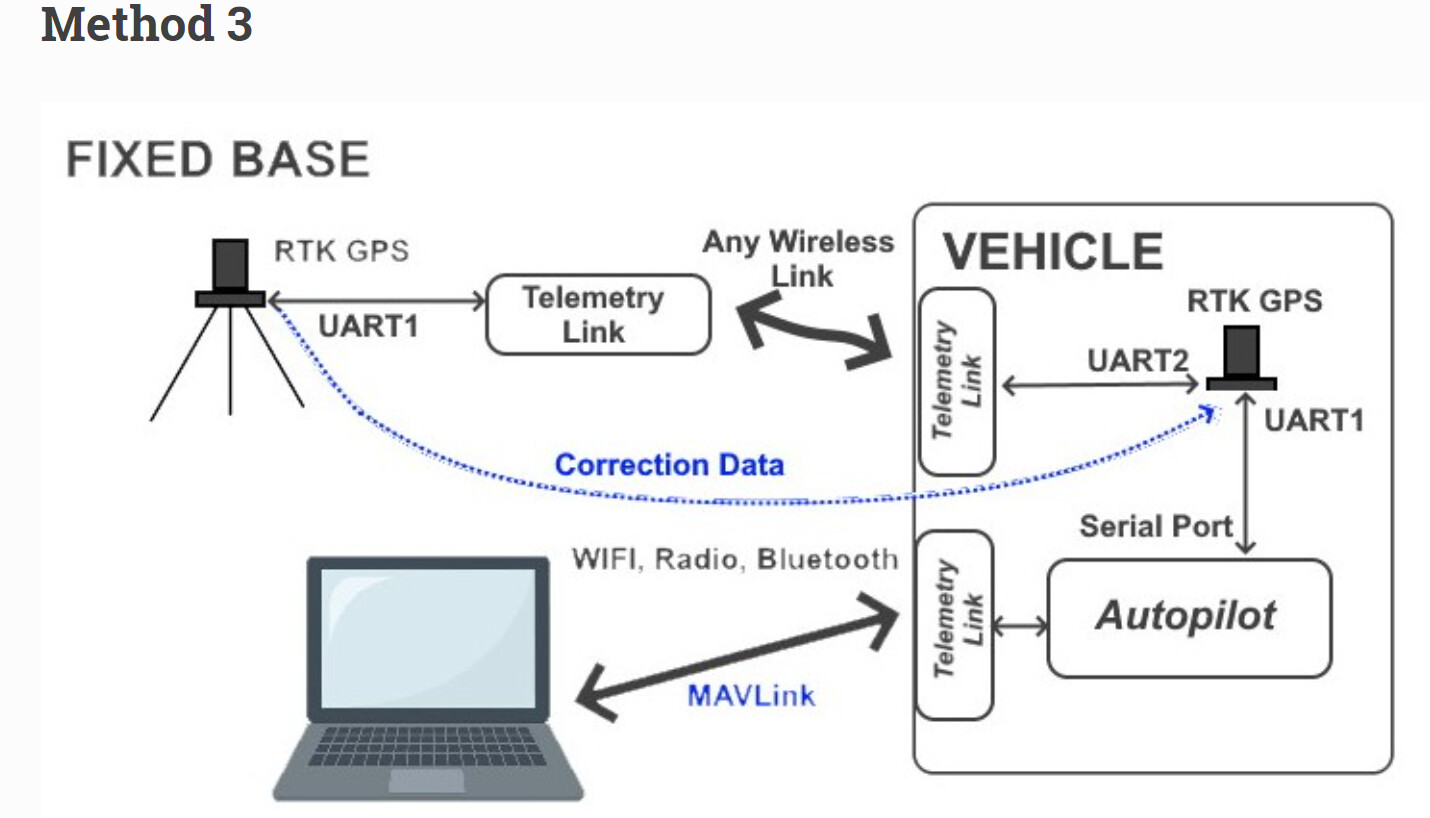
I have a here 3 gps and rtk base statıon. I want to use rtk fixed base with method 3 (RTK GPS Correction (Fixed Baseline) — Copter documentation ). Can ı do this method here 3 gps ? Here 3 gps protocol is can bus but above links documantation on the pithcure base and rover has a uart 3 output . How can ı ımplement this tecnic with hear 3.