I agree that at first glance aircraft appears to be underpowered, but after looking at the log, there is no amount of balancing or tuning that is going to fix this.
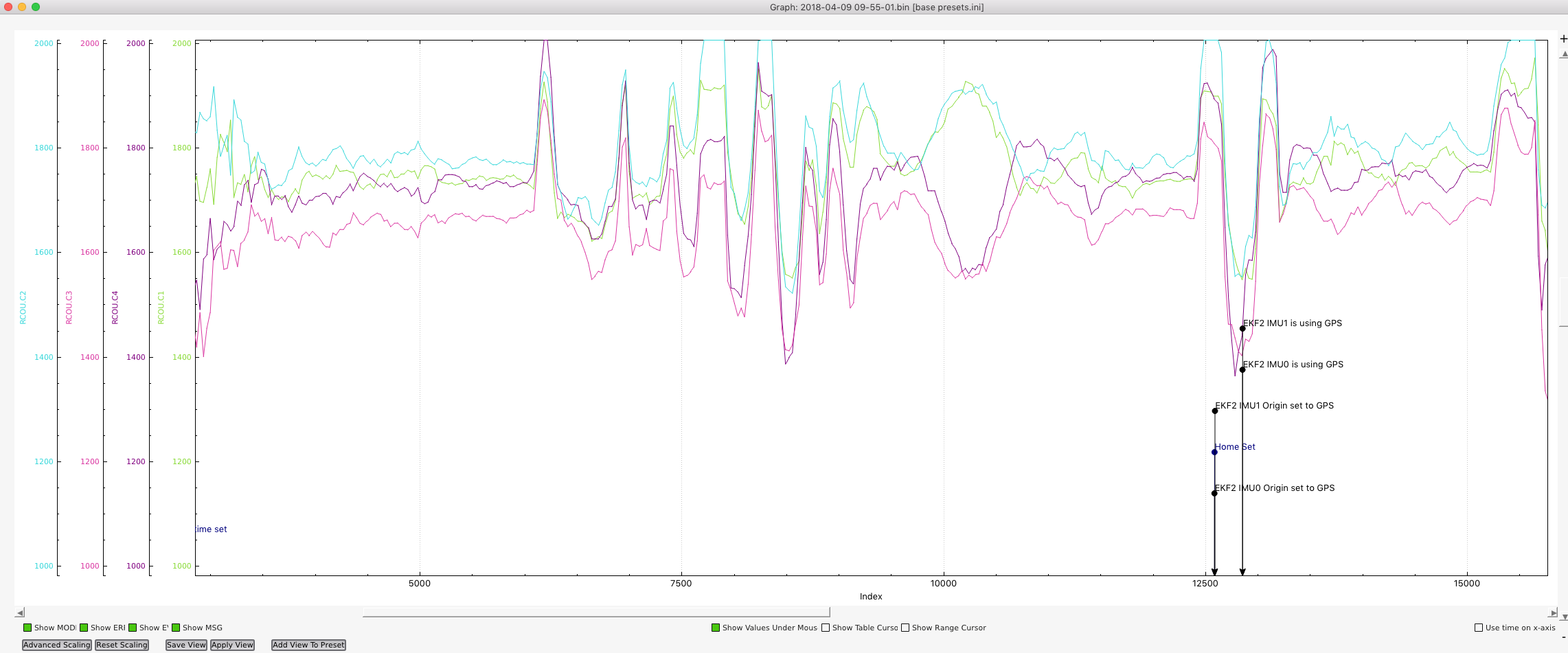
If you use the log browser in Mission Planner and look at RCOU > C1,C2,C3,C4, you will see the motor outputs clipping at 2006. The motors are being maxed out, and there ain’t no way that should ever happen on a camera platform…
As for the maximum output PWM number of 1800, that leaves just 200 for the FC to maintain stability. A PWM of 200 is no where near being enough head room.
A “typical” throttle range is from 1000 to 2000. With 1500 being 50%, 1600 is 60% and 1650 is 65%. 1800 is 90% throttle so your useful headroom is only 5% because the thrust change from 95% to 100% throttle is insignificant. http://ardupilot.org/copter/docs/motor-thrust-scaling.html. Read MOT_THST_MAX…
When I’m number crunching for a new aircraft I shoot for a hover throttle of 50% or slightly lower. I use 60% throttle as a warning, and 65% throttle as a hard limit. This method puts the Hover PWM between 1500 and 1600, with a hard limit of 1650.
If the projected Hover Throttle for a given configuration comes out above 65% I start looking for ways to cut some weight, or I start looking for a better power system configuration.
From where I sit the problem is a motor/prop/battery miss-match.
First off, these motors are not rated for 4S.
Second, the reason the motors are being maxed out is the props are being over sped which actually lowers thrust.
Here is a link to the motor test data:
https://www.foxtechfpv.com/sunnysky-221213-kv980-p-384.html
With an AUW of 1800 grams Mike should be swinging 9047 props on 3S, which sounds a lot like what a DJI Phantom runs…