Hello,
I am trying to tune a dual motor, non-vectored tailsitter in QHOVER. The tune seemed ok overall till I had the crash shown in the video below at 2:15.

My setup is:
- Matek H743 Wing - V3.
- Latest stable Plane firmware.
- Feetech STS3032 servos.
- I use the LW-PLA version.
- 8x6 props.
- Flying indoors for now so no GPS, no magnetometer. Just IMU and barometer measurements.
As can be seen below commanding pitch at -30 degrees for 1-2 secs produced an instability. The plane did not pitch up even with full stick up and crashed.

I try to understand if I have done anything wrong in the tuning or if its the CG position the issue. However I tried to place it as close as possible to the manufacturer’s suggested point. So to rule out the possibility of wrong tuning it would be very helpful if anyone could review my flight log.
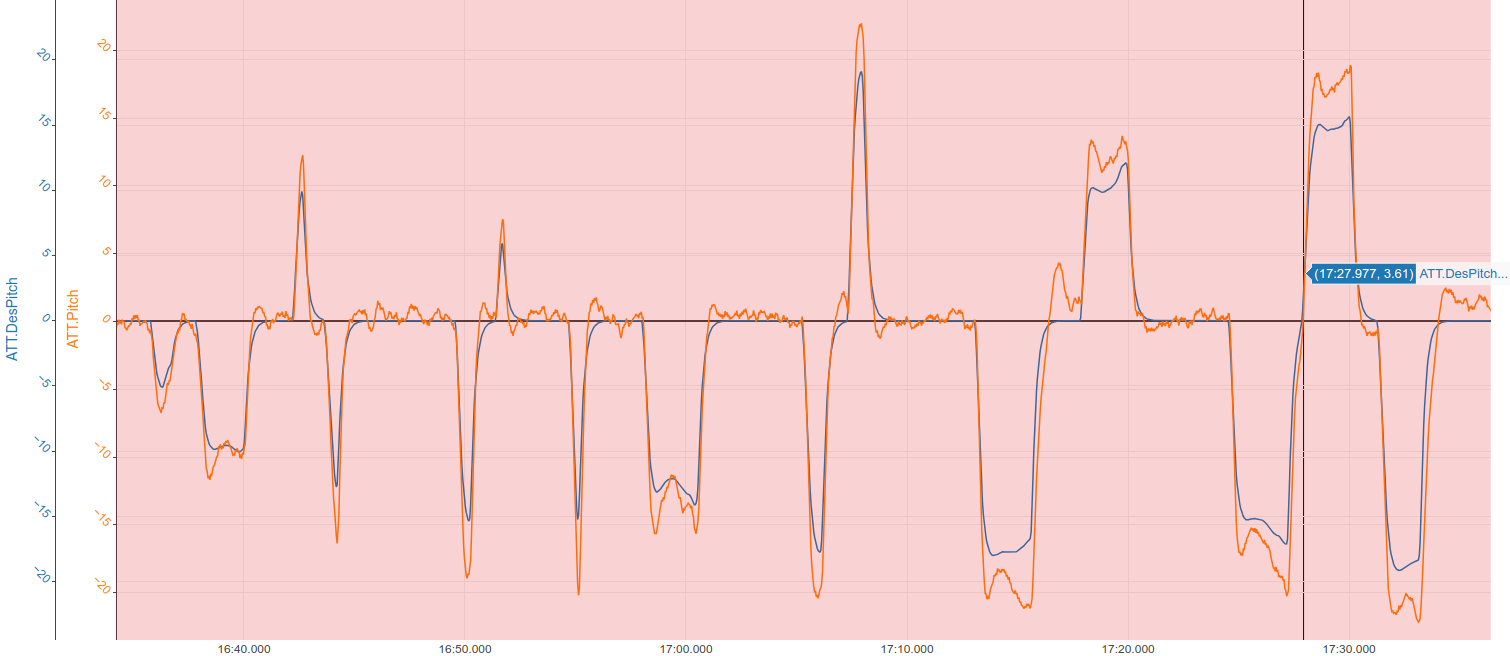
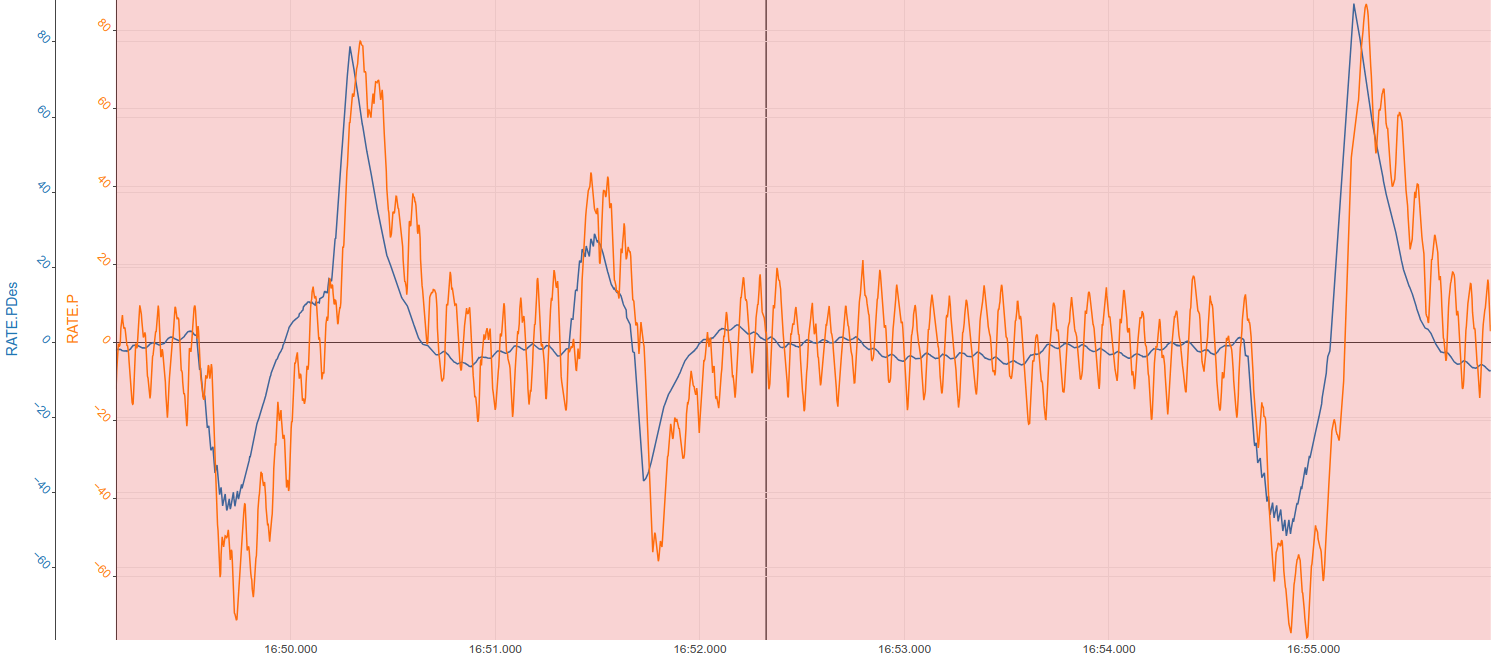
There I implement some pitch, yaw, and roll maneuvers and at the end comes the crash. For easier reference I add below some photos of the PITCH signals.
- pitch vs desired pitch for some successful maneuvers
- pitch rate vs desired pitch rate for some successful maneuvers