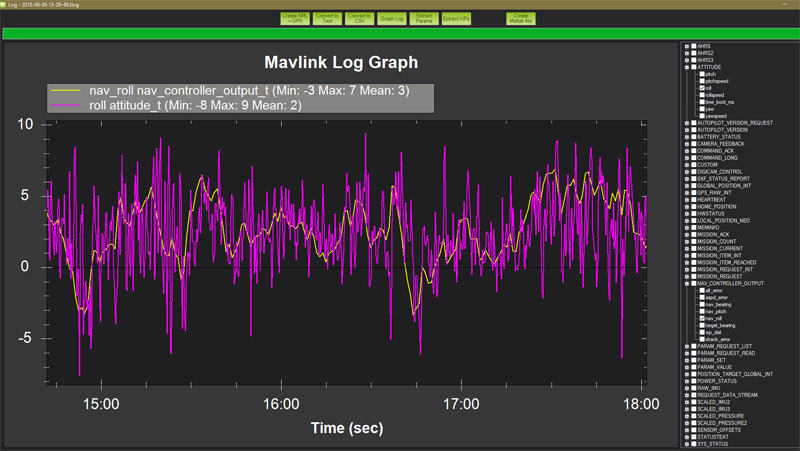
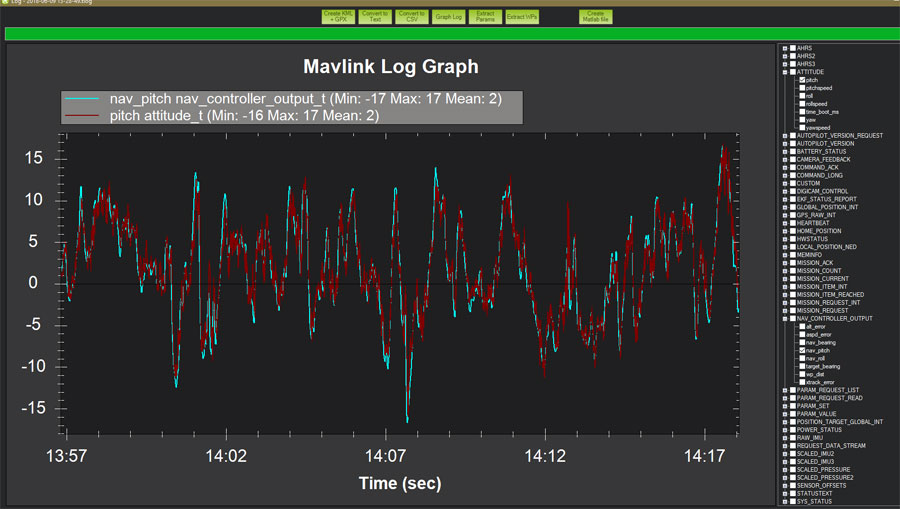
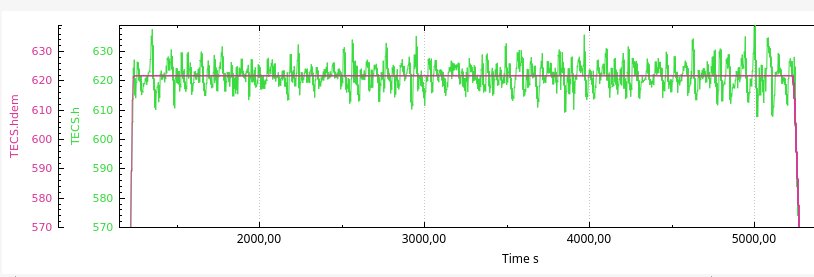
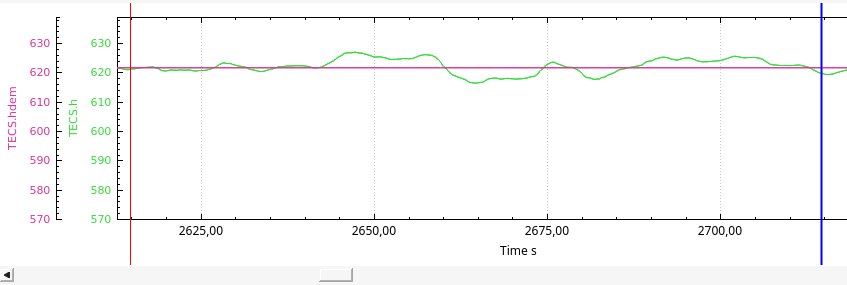
I have am using the believer rc plane with an AUW of about 10.5 Lbs. I am still having a bit of difficulty getting some of the tunings correct. I believe my COG is perfect however one problem I have when flying in auto is that the plane will climb and descend over and over again throughout the mission. It will climb 10-20 feet higher than the flight path then down to 15-20 lower and it repeats. Also it seems to be roll seems to be off too. I am attaching my telemetry logs. Can anyone tell me if they look normal or?
My PID’s right now are…
on pitch P= 0.9 I= 0.10 D= .02
on the roll P= 1.0 I= 0.15 D= .02
Any help appreciated.
TLOG https://drive.google.com/file/d/1OLymg7E6gy2guaKzlFeBinOJtW6U6TRP/view?usp=sharing
BIN https://drive.google.com/file/d/1MEjWL4l6aL4hPKC0t8RaHF1vfF0U5NnC/view?usp=sharing