Hello,
I am trying to implement a pretty basic logic to communicate with some servos. So I created a new thread that iteratively calls the function bellow.
The logic:
- write a message to the 1st device
- wait for message to be written
- write a message to the 2nd device
- wait for the message to be written
- read the responses
- exit
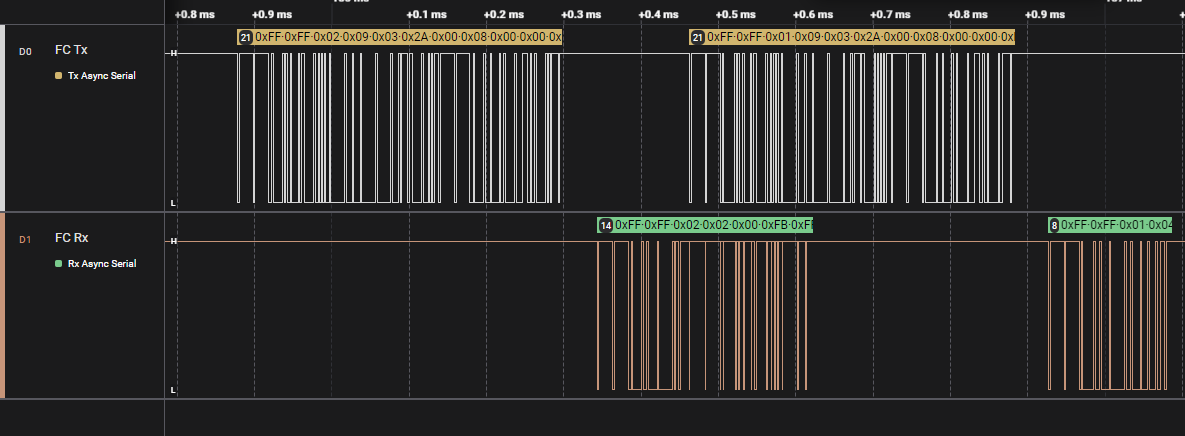
The problem is that sometimes the hal.scheduler->delay_microseconds() do not do what they are intended and the situation shown in the picture occurs where simultaneous read/write corrupts the data (the device has one wire for read/write). I can solve the issue setting _uart->_uart->set_unbuffered_writes(true);. But then internal error 0x4000020 occurs.
Any ideas on how to fix the internal error or maybe a workaround? I am using Matek H743 with latest Arduplane FW and using Serial4 which has DMA enabled.
void servo::update()
{
uint8_t n_bytes;
if (!_init_done) {
init();
return;
}
// send 2 packets to servo 1
send_pos_cmd(SERVO_ID_1, 2048);
send_status_query(SERVO_ID_1);
hal.scheduler->delay_microseconds(1500); // wait for reply (clear bus needed)
// send 2 packets to servo 2
send_pos_cmd(SERVO_ID_2, 2048);
send_status_query(SERVO_ID_2);
hal.scheduler->delay_microseconds(1500); // wait for reply (for next iteration's writes)
// GET REPLIES
n_bytes = _uart->available();
if (n_bytes != 28) { // Normally 28 bytes expected
_uart->discard_input();
}
else {
_uart->read(_rx_buf, n_bytes);
}
}