Hello,
I need help with log analysis for a crashed flight.The crash resulted in the battery catching fire.
This is for quadcopter that uses Pixhawk. We use a 6S Li Ion battery.
The flight log is available at the following link
Context:
After take-off, at about 16m altitude AGL, the AV went into AltHold mode due to GPS Glitch. (We have set the FAILSAFE response for GPS Glitch as AltHold)
No. of satellites for GPS1 was always higher than that of GPS2 except once.
HDOP for GPS2 was always higher than that of GPS1.
But no change was seen on either when the AV went into AltHold mode.
The pilot was unaware that AV went into AltHold mode, and couldn’t take control.
EKF variance occurred immediately after this.
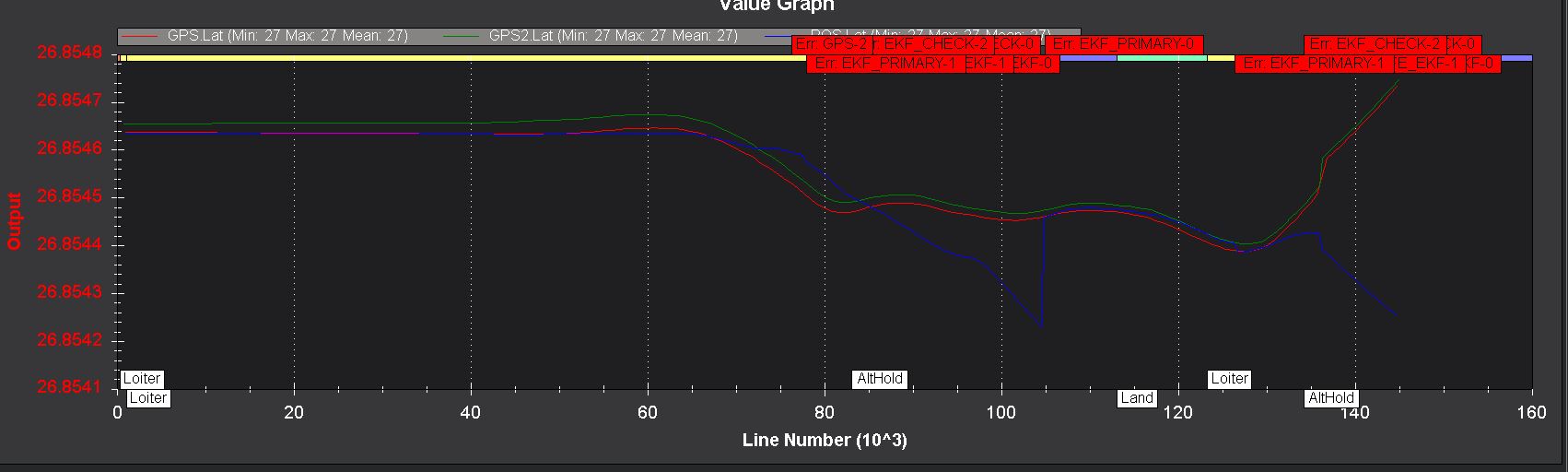
If u compare the Lat/Long of GPS1, GPS2 and POS, you can see that POS plot switches from GPS1 to GPS2 right before AltHold mode. There is considerable variation in POS plot thereafter.
The pilot switched the mode to LAND (Because the GPS Glitch cleared for sometime allowing the pilot to switch to LAND)
However, this made the AV extremely unstable and it flew in an arc to the left, with high speed, hit a building and crashed which led the battery to catch fire.
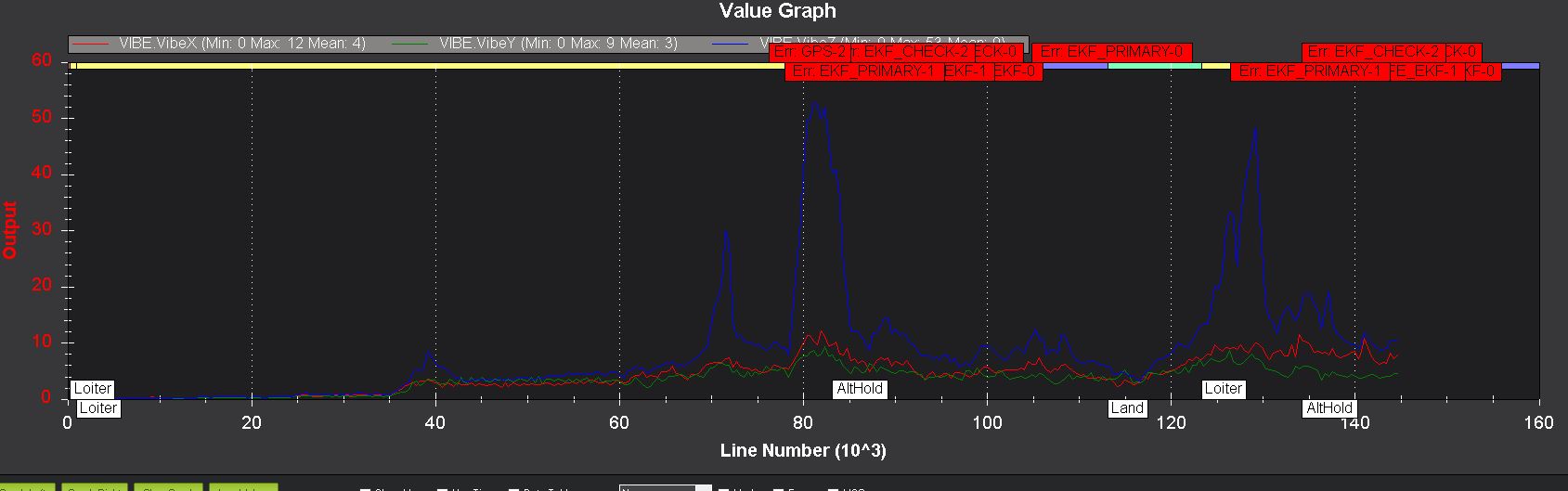
If u check the vibration logs, you can see that there is incremental increase in VIBE values especially on Z axis.
Questions:
- Is there something that we are missing while analysing the log that will lead us to the root cause?
- What would have caused the POS variance? Both GPSs have been observed to give similar values, and they were verified to be correct. We assume that when the pilot switched to LAND, the AV thought that it was in a different location, and flew to land at the location where it was commanded to land.
- Will that be an issue with IMU output or Compass?
- Would Li Ion battery cause issues with IMU? We have seen issue with mag calibration (LIS3MDL) before, but we used HMC5883L for the flight under question and this issue was not seen.
Please help!
