Hi team, im hoping for a few pointers, our mower is almost use usable - except for pivot running wide on some turns.
The hardwares all good, but convincing the mower to not overshoot corners, not so much.
- Really good repeatability - RTK YAW sorted, it repeats the same path accurately
- Pivot turns when implemented are perfect
- Despite my efforts and tuning, i cant command pivot turns - mower will offshoot and rejoin, which doesnt work when there are fences and cliffs involved…
ArduSimpleRtk2b x2 + 1 for base, Qiotek Zealot H7. Rover 4.2.3
Mower is slow 0.7m/s
Tuning for turning is ok. I havent tuned for speed.
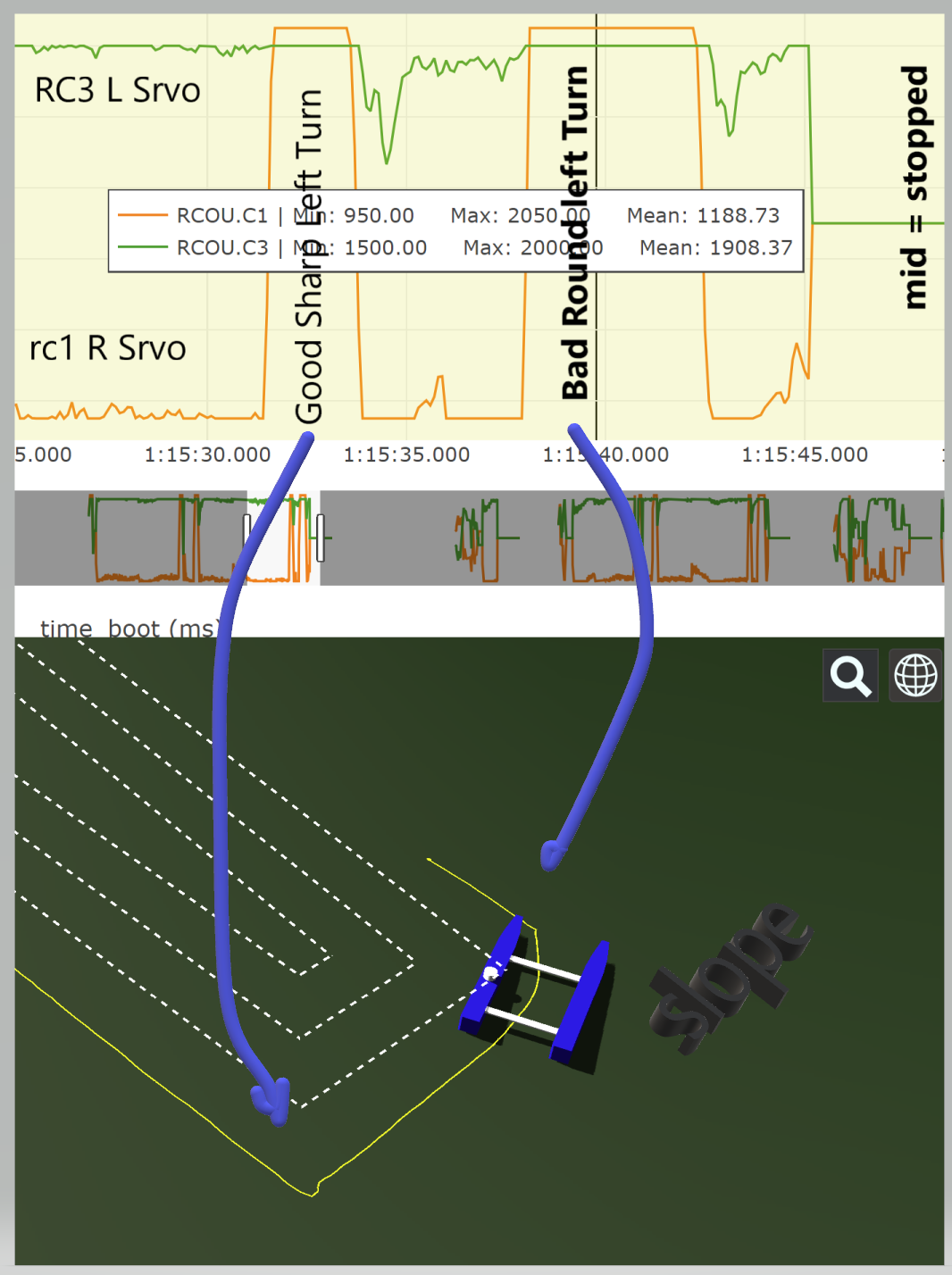
Here is a video of when it looks good and when it offshoots.

Note - i have subsequently changed from NTRIP to local corrections, as the ntrip server used in that video was too far away (19kms) . Our local one fixed a lot of accuracy issues. Due to that the log of this, probably is showing degraded RTK issues as well as navigtion problems.
The issues seem to be the downhill turns (sloping land), and the WP_PIVOT_* params seem to have no or little effect.
Progress is a little challenging due to endless rain, so any insights appreciated.
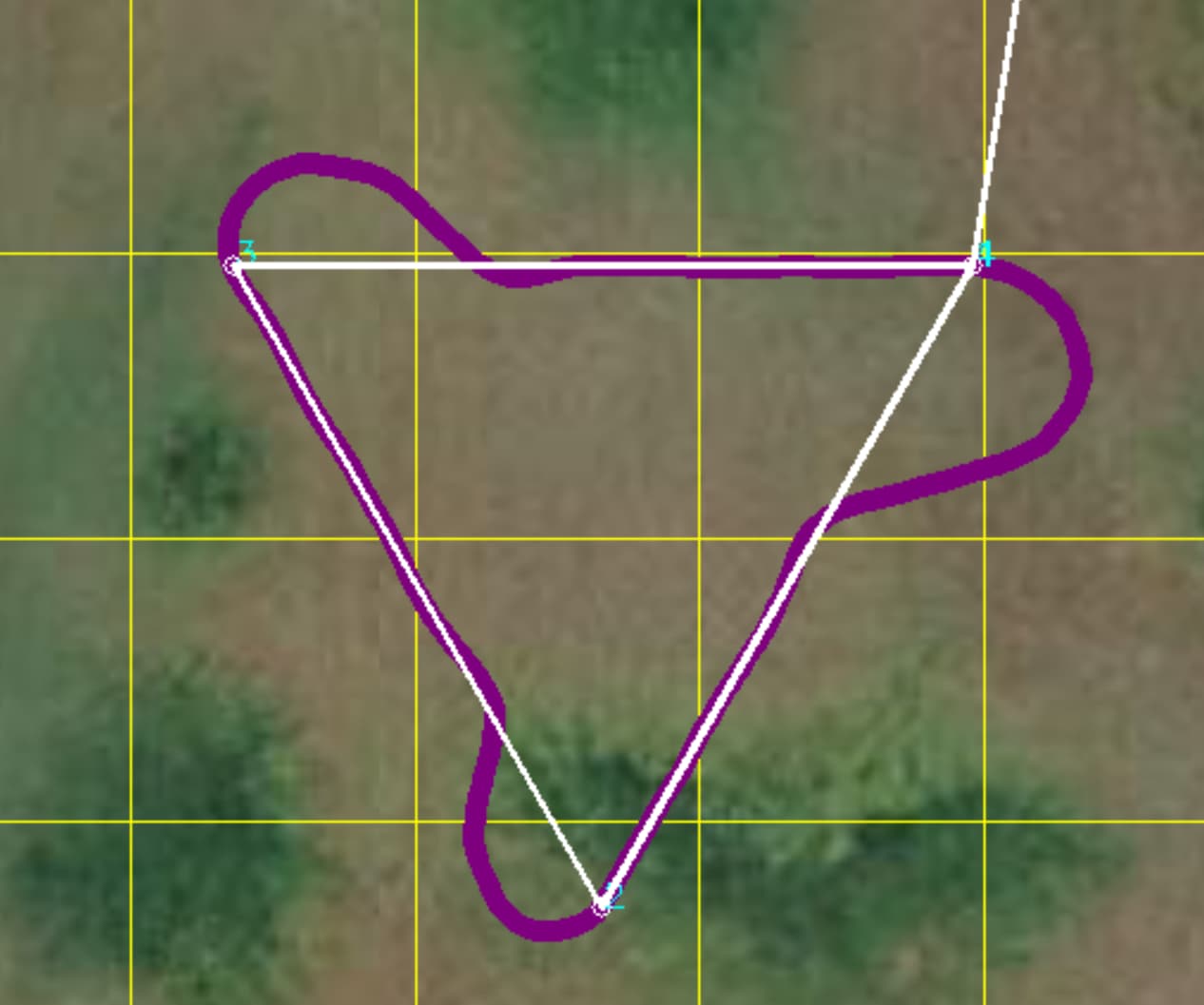
After changing the steering/pivot parameters a bit i managed to get no pivots working, with the problem being demonstrated in the last test run - a 3 point waypoint circle (triangle!) now with all turns overunning.
with this logfile. 00000070.BIN
I went though my parameters related to turning - and compared with the default for SITL stable skid-rover and will reset mine back to more default. He’s the diffs.
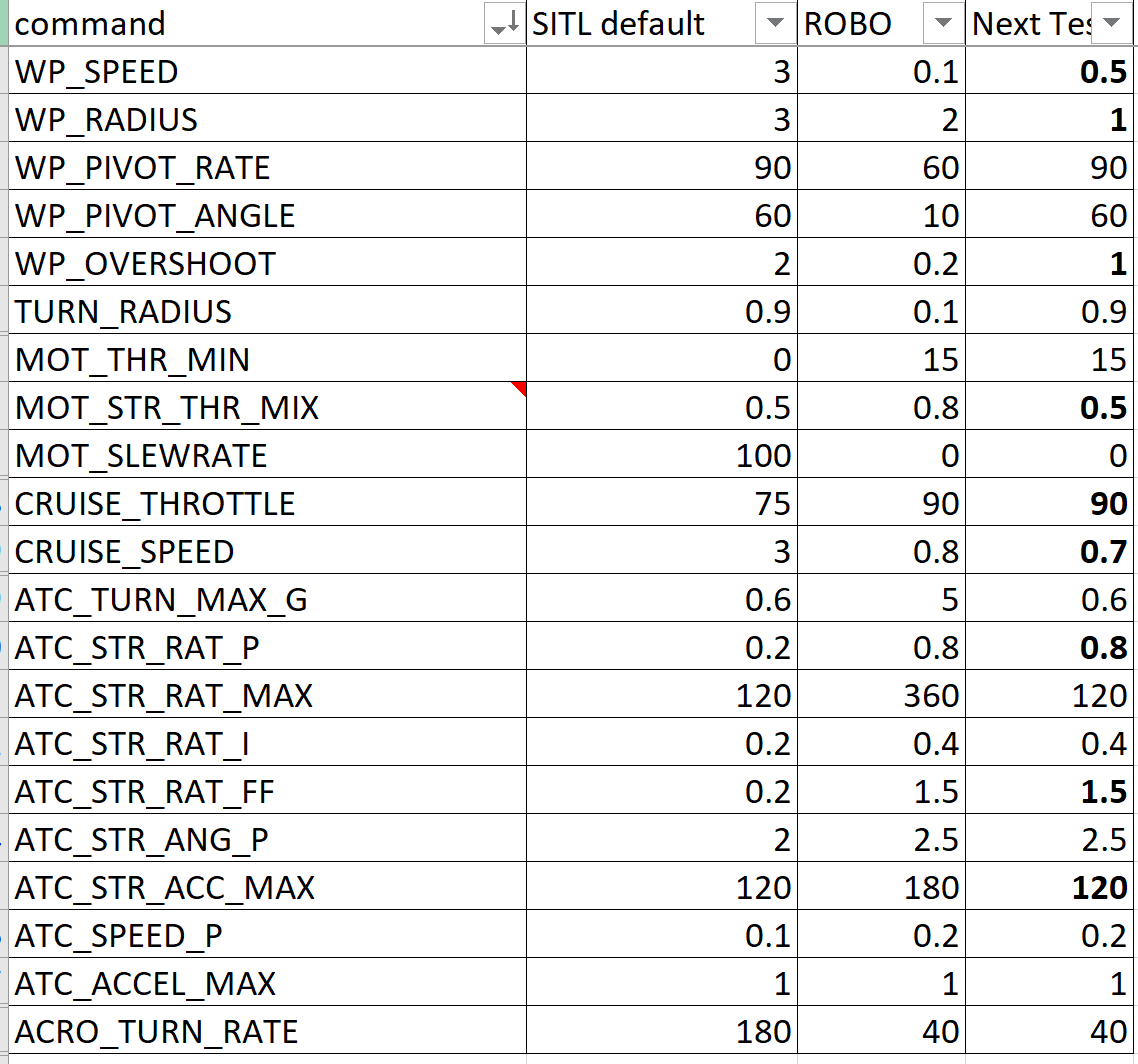
I changed NAVL1_PERIOD with no effect, WP_PIVOT_ANGLE same.
Any help appreciated, and thanks in advance - Paul.
ps - Here’s a previous log - with more data, and a few previous params.
00000064.BIN