On the second flight of this Heewing T1, I ended up nosing in to the ground.
I was kinda fighting the plane initially, then gave up and switched to manual mode which resulted in a nose-over and crash.
I believe I understand the reason, but would appreciate a bit of advice to confirm I’m looking at the right things, and I have one curious question.
1: I think my Q_OPTIONS bit is set incorrectly. I’m confused by this because I swear I had set it correctly, but looking at the plane now, it seems like only bit 21 is set (2097152). I had thought bit 19 was set. This explains why the plane transitions back to QLAND when failing to transition, instead of completing the transition at low airspeed.
-
I didn’t want to QLAND in those spots, so I tried twice to bring the plane back: once in FBWA, which switched to QLAND on failed transition, then once by switching to QRTL mode, which also auto-switched to QLAND presumably for another failed transition. Both understandable without Q_OPTIONS bit 19 set. My fault.
-
Presumably the plane nosed over when I then switched to manual because it was unbalanced and/or just stalled out of the air while the tilt motors were transitioning.
This is all understandable.
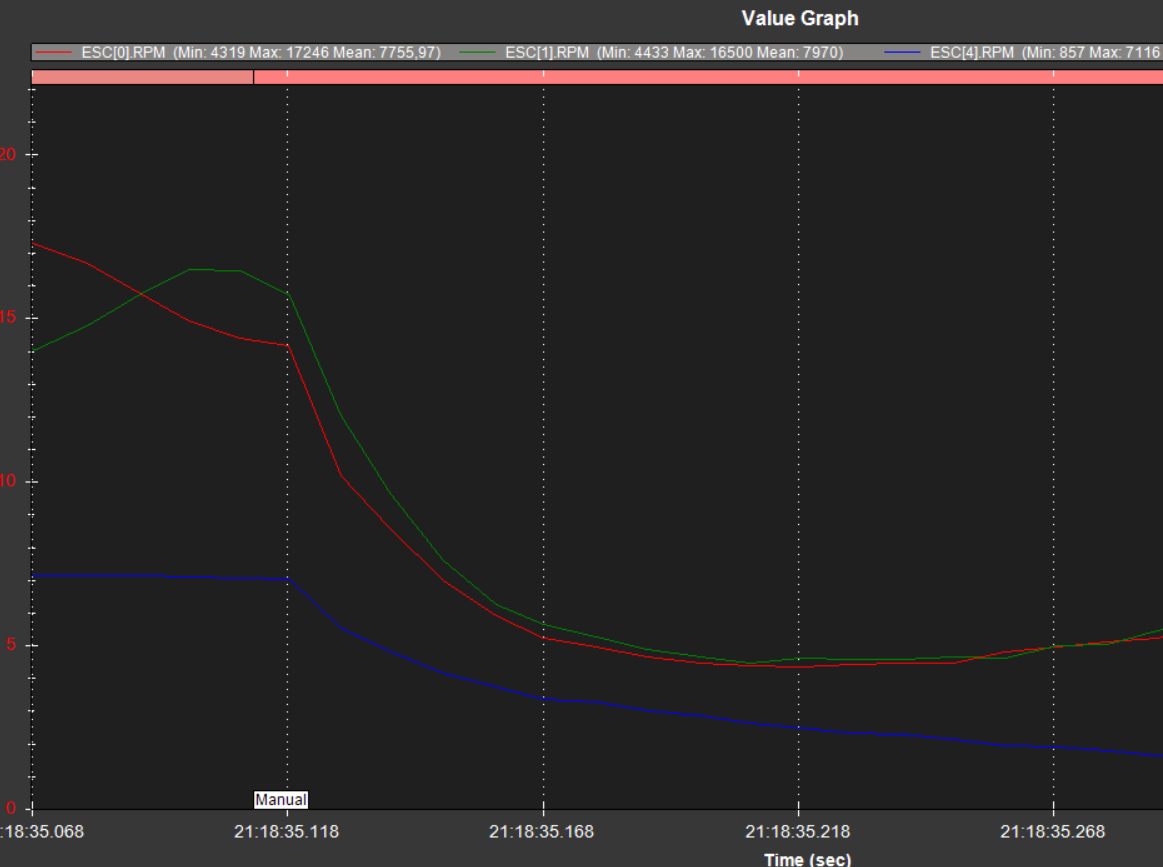
However, when I switched to manual mode, it looks like the rear motor spun up (looking at the ESC rpm logs, the ESC RPM on Instance 2 climbs after switching to manual mode). Maybe this is just windmilling, because RCOU:5 (tail motor output) drops to zero as expected. I’m surprised the ESC telemetry records windmilling?
Last question: The “IMU0 emergency yaw reset” - is that something I should be worried about?
Video and binary log are here: Heewing T1 debug - Google Drive