Hi
I have done a autotuned over the weekend after a complete rebuild of my drone. All went well and fly’s great again! I have change a lot of setting to get it as perfect as possible, would like to get as good as I can get it with the help of you guys that have more experience in tuning. Attached is my log file, PID Tune and Parameters.
My setup:Parameter List 04-07-2020.param (17.5 KB)https://www.dropbox.com/s/dledrebjom6dv6s/2020-07-04%2011-00-43.zip?dl=0(upload://kQqHbfiMMAnjT8y34WJNwRTxJXC.param) (17.5 KB)
vosair
July 7, 2020, 5:26pm
2
If you haven’t already followed this wiki , that’d be the next step I took. There’s a very active thread on tuning it.
1 Like
hosein_gh
July 8, 2020, 9:32am
3
your Roll PIDs are very low for a copter in this size
I will make one this afternoon, I’m not home at the moment.
hosein_gh
July 8, 2020, 4:55pm
6
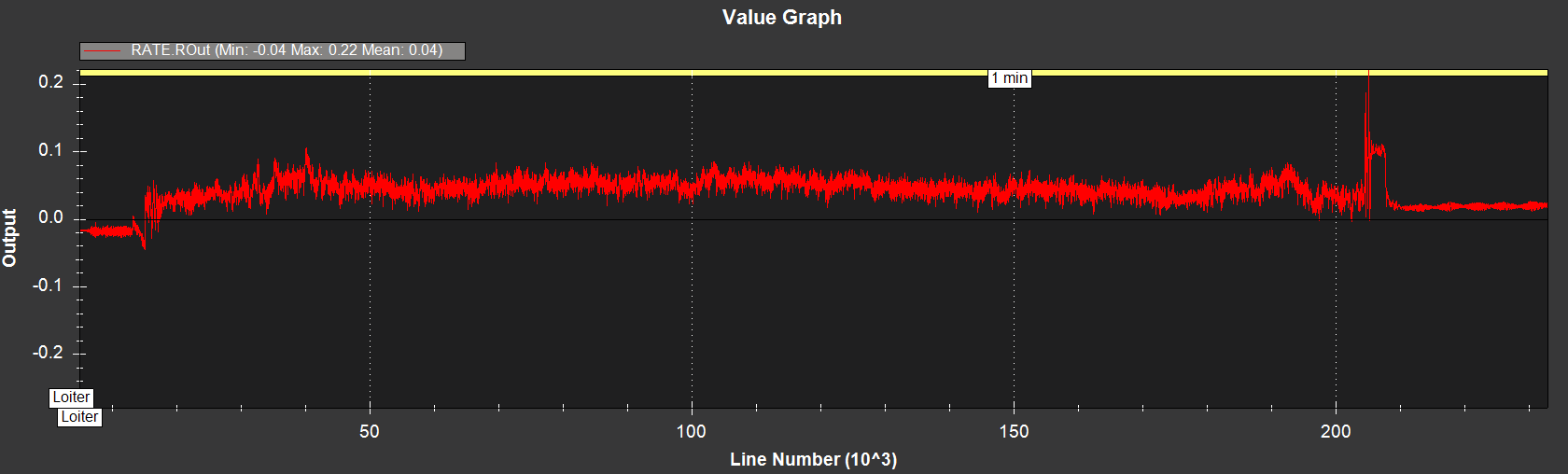
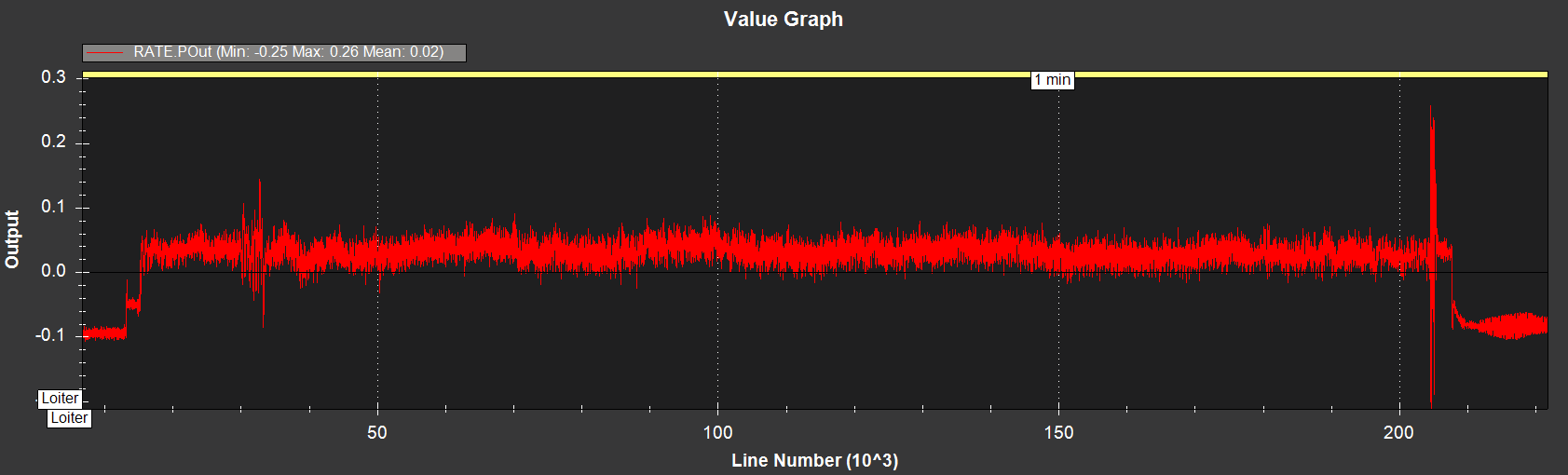
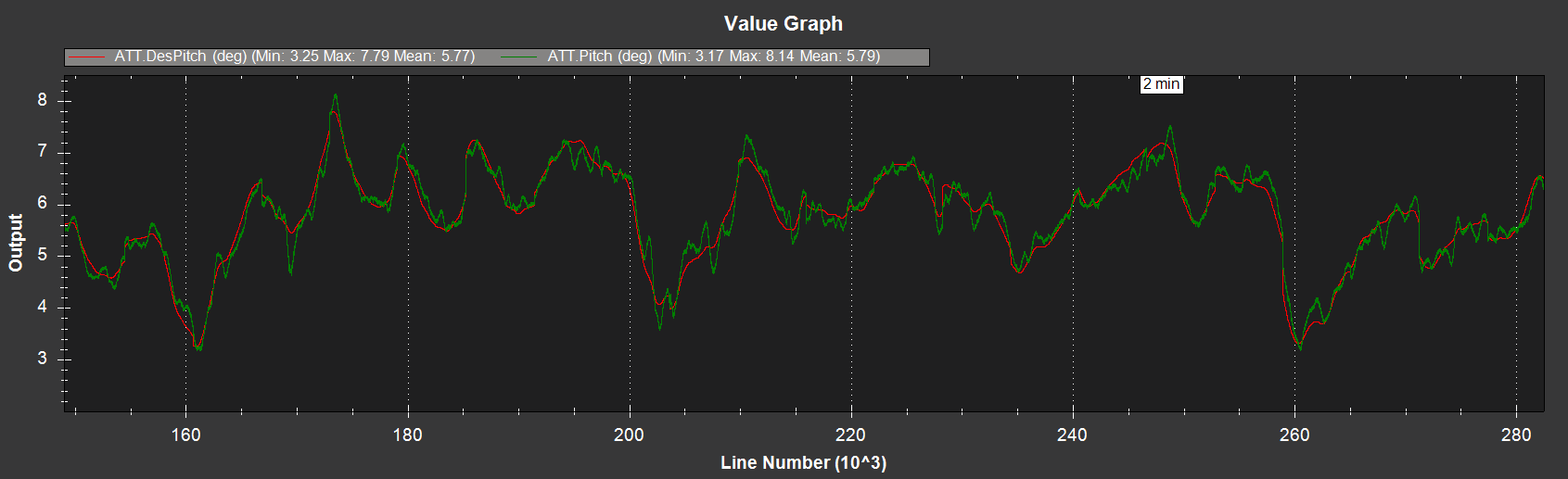
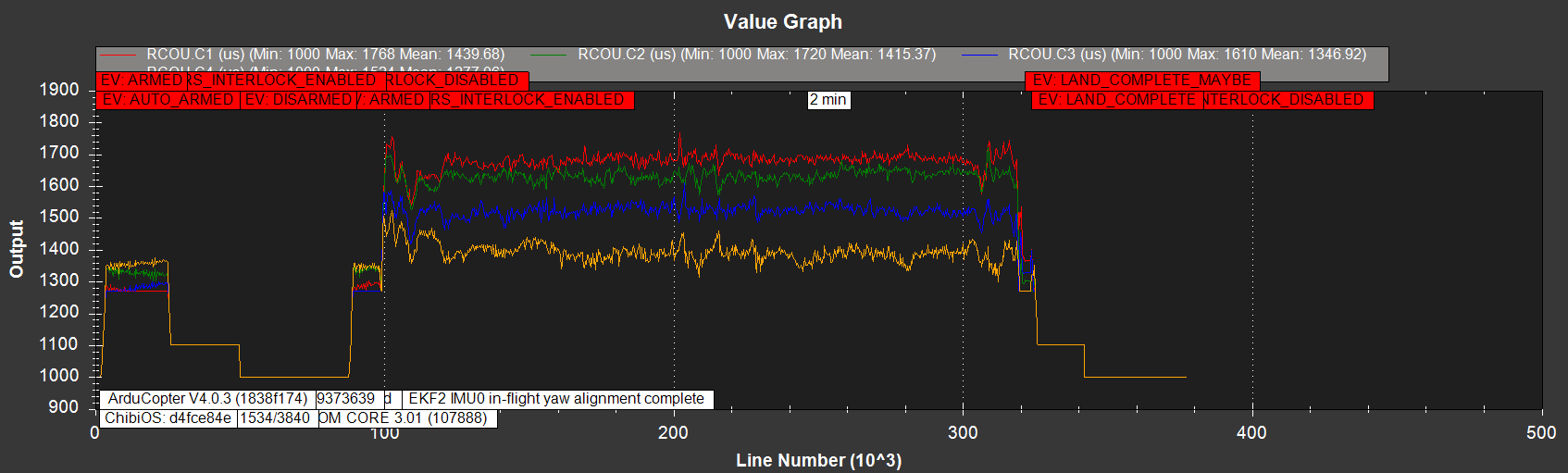
OK , you have noise problem
and RATE values show it better
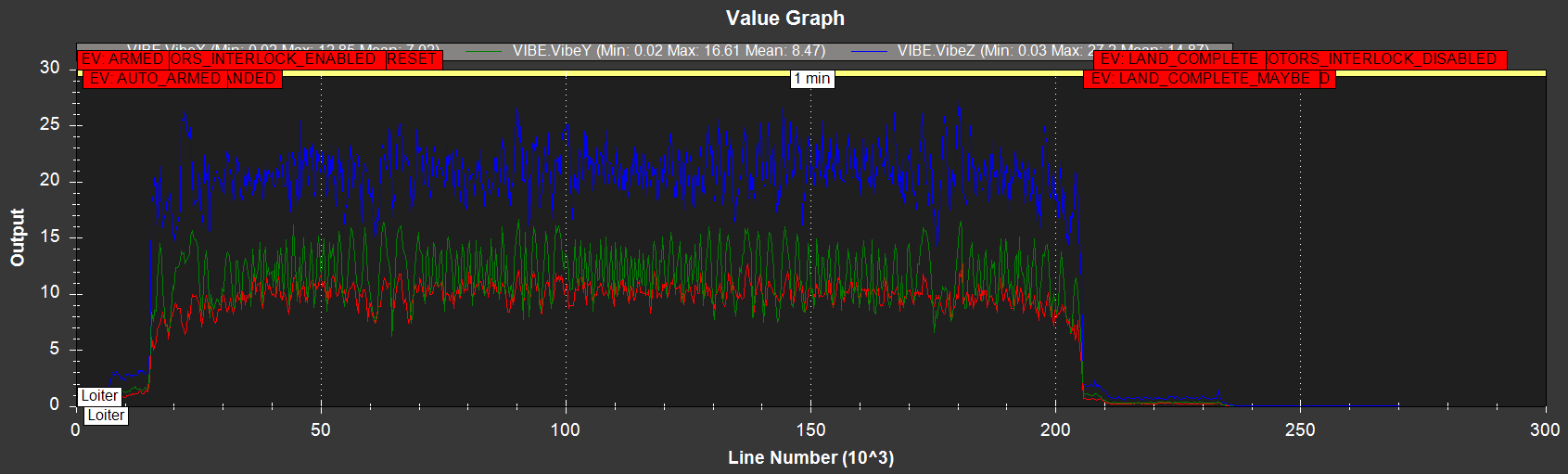
to resolve this problem first check for hard wires or anything cloud transfer vibration from body to FC because your vibration is a little bit high
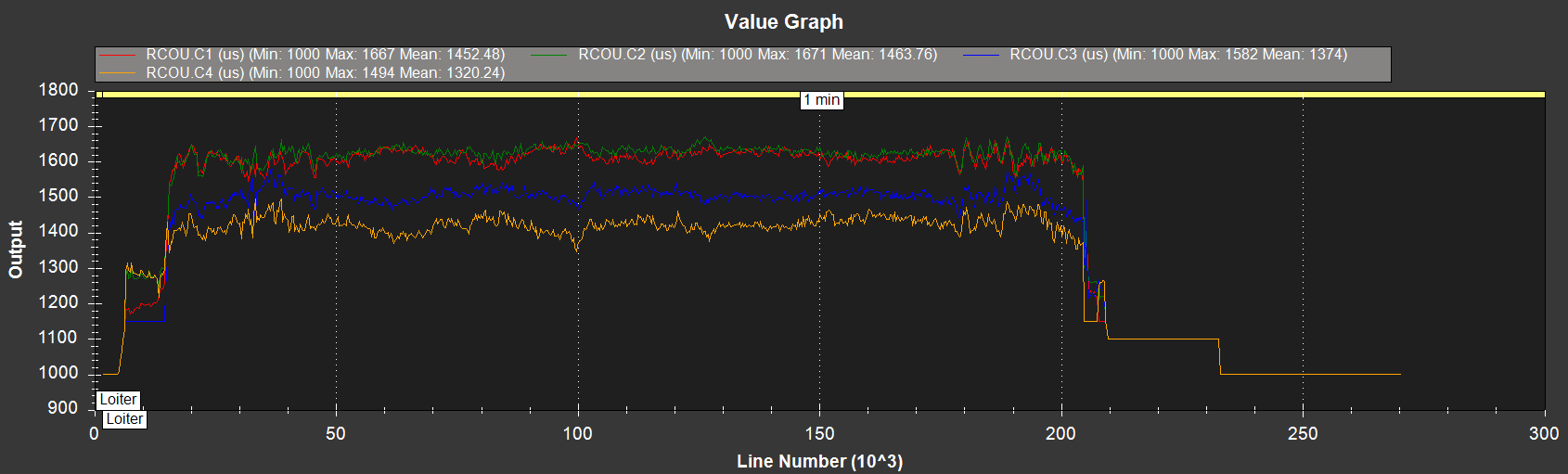
second check for twisted arms your CCW motors are working harder
after all revert back PID values to default and do
harmonic notch filtering then run autotune again
Good Luck to finishing this config
1 Like
Filters at zero are a bit strange
1 Like
vosair
July 8, 2020, 5:40pm
8
Yes I should have clarified as hosein did that you need to set up the notch filters, and then do another autotune.
1 Like
Thanks, we have some heavy rain for the 2 days to come will do the tuning over the weekend and post the results when I’m done.
vosair
July 8, 2020, 11:42pm
10
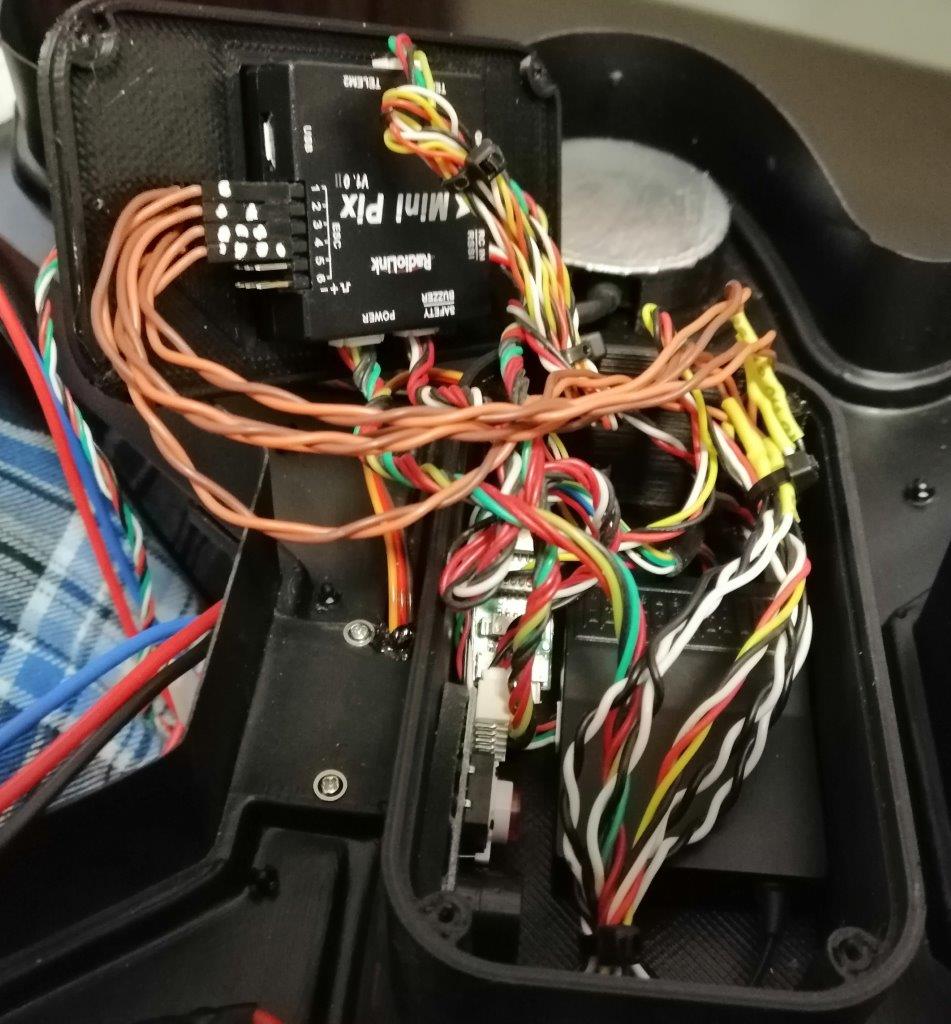
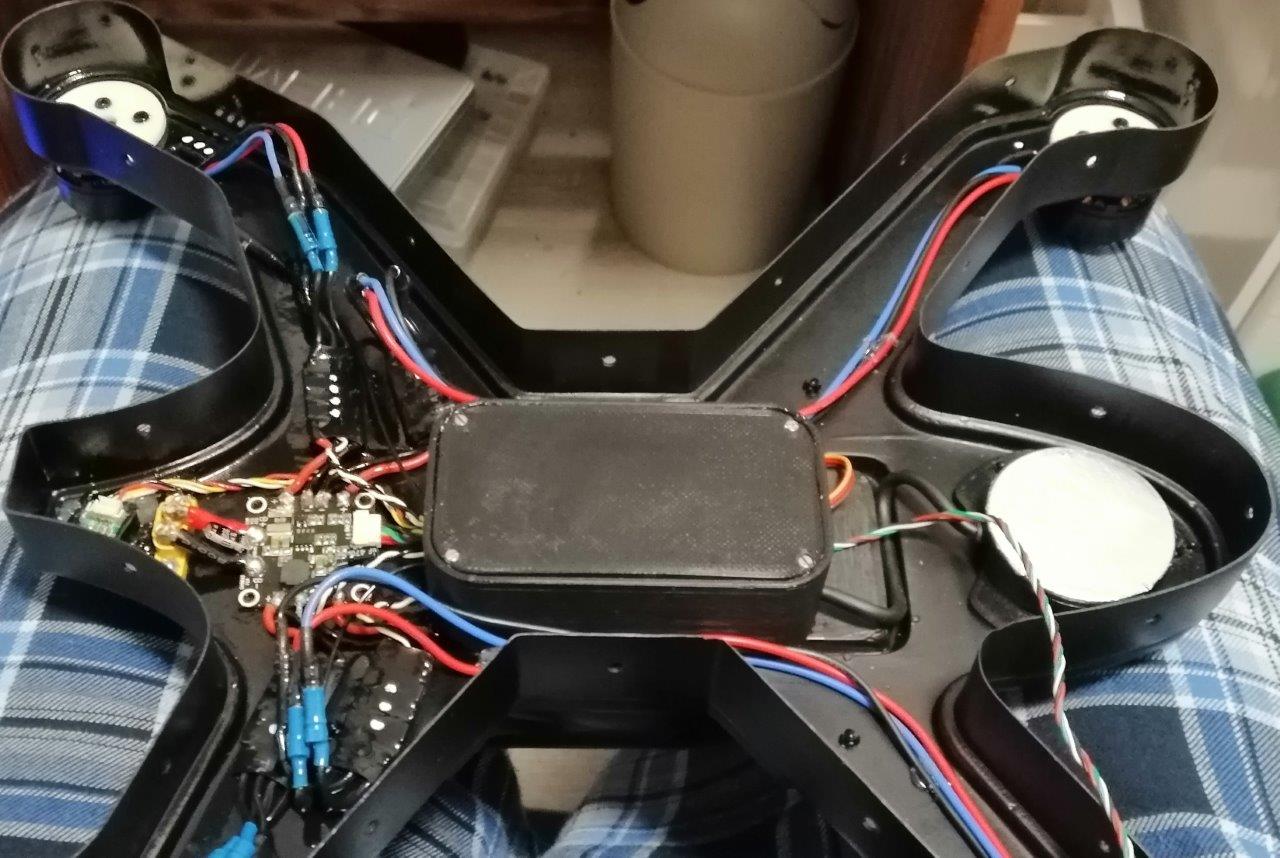
How is your flight controller mounted to your frame? Might be a good idea to try some of this or something similar.
Hi Vosair
I have installed it in a 3d printed box and stick it to the lid with thick double sided tape.
Vida29er
July 12, 2020, 1:14pm
12
Ok so here is my new tune. it was a little windy this morning.
Shared with Dropbox
i still think that those FILT at zero are strange.
hosein_gh
July 12, 2020, 4:12pm
14
again low PIDs on roll and its a poor tune
also still you didn’t physically balance your copter
first physically balance your coptertuning process instruction (every step is important)harmonic notch filtering