Hello eveyone!
i am building an 3 inch quad, and need help regarding several issues
i am not really familiar with FFT and harmonic filtering and cant seam to figure out the best settings, based on the attach log it is possible to give some sort of direction? or help me deduce the best settings?
as the quad is extremely overpower i cant seam to make the quad really stable in alt hold, can anyone suggest some thing i might change base on the attached log?
after the quad fly great ( no problems) i plan to perfrom an autotune
thank you very much! any help given is well appreciated
The tune needs work but in general you are starting from a decent place. Try these and then make another Hover Flight in AltHold so we can set the Notch Filter:
ATC_ANG_PIT_P,12
ATC_ANG_RLL_P,12
FFT_ENABLE,0
INS_ACCEL_FILTER,10
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
Ah well, then you have changes to make to take advantage of that.
Flash the Bdshot version of firmware to the Flight Controller. Download the .apj file from here Matek H743-bdshot and use Mission Planners “load custom firmware” to flash it from the Install Fimrware screen.
The set these:
MOT_PWM_TYPE,6
SCHED_LOOP_RATE,800
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,15
SERVO_BLH_POLES (set the pole count for the motors you have). Default is 14 but that might not be right.
SERVO_DSHOT_ESC,1
SERVO_DSHOT_RATE,2
Then do another hover flight. There should be ESC telemetry data in the log.
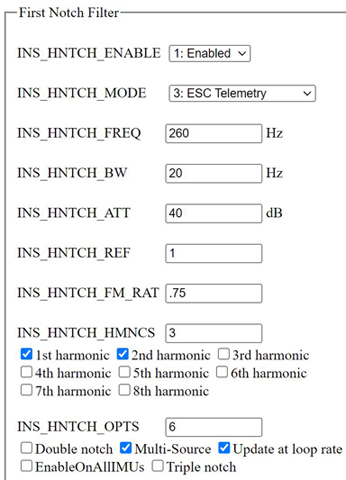
Excellent progress Zeke. You now have ESC RPM Telemetry to drive the Notch filter so set these parameters:
At this point you could make another hover flight to check the filter results or go right to Auto Tune. If you are battery limited to do all 3 axis at once set AUTOTUNE_AXIS to Roll only and give that a try. The goal here is to see if the tune is in good enough shape for the Auto Tune to complete and then review what it did.
i have sucessfully perfromed the autotune. also have used the params you suggested. i appreciate the help very much. can you help me to verify and review the filtering settings or any other settings that might effect the performance ?
The Notch filter is working well. You will notice that Auto Tune spun up the Angle Pitch and Roll values to max (36). We often see this on small quads. You may want to lower these to 24. The Rate Pitch/Roll PID’s were greatly increased from where you had them but they were relatively low before and now they look a bit high for a 3" but this is very craft dependent. If it’s jittery or there is oscillation you could drop them down to maybe .07 . You may have to slightly drop the D-term also.
thank you so much!! i will fly longer and really feel the quad, and will change the pid like you suggested if it feels off. regarding the initial pid tune, i actually guessed the numbers . i will let you know if i have futher proplems. actually since my goal is to fly the quad in loiter, i found that it jitters a bit in loiter mode, but i have to tune the optical flow first. will keep you update.