Hi All.
I want to connect 4 brushless dc motors to pixhawk
the motors has only 5 wires instead of 6 (see attached link)
I could not find any record how to wire them to the flight controller.
help is much welcome 
kind regards
Benny
Hi All.
I want to connect 4 brushless dc motors to pixhawk
the motors has only 5 wires instead of 6 (see attached link)
I could not find any record how to wire them to the flight controller.
help is much welcome
kind regards
Benny
Why do you expect 6 wires?
The connections are documented on the site you linked.
Red: Power+ (Power from battery, not the servo rail)
Black: GND
White: direction (relay)
Yellow: Encoder signal
Blue: PWM/Analog speed control.
This motor has a brushless motor controller build in, but to use it, you must set ardurover to “brushed with relay” ESC type.
Hi Sebastian,
thanks for your kind help!!
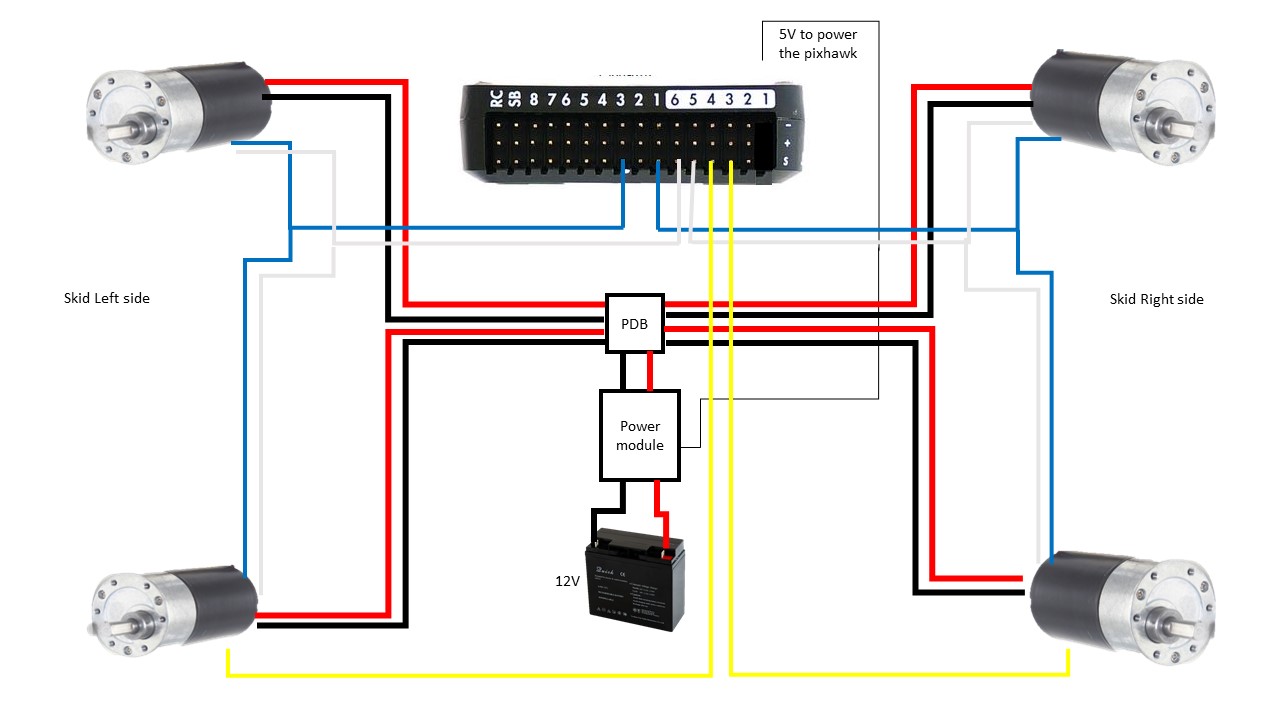
so if I get it right there is no need for ESC`s and the wiring should be like the attache picture?
Looks ok. But you will not be able to use the encoder signal. Ardurover expects a signal from two seperate sensors on two input pins per motor to form a quadrature encoded signal. Your motors only give a rpm signal.
OK understood!!
thanks for your kind help!!
i managed to connect the same motor with ardupilot. The motor turns in both directions.
the problem is that i can not seem to get the motor to stop turning. as soon as i aply power to the system the motor starts turning and never stops. Using the joystick i can change directions but when i am not touching the joystick the motor turns constantly.
I think it has to do with the PWM values. I tried everything and i can not seem to get it working. Any ideas?
What type of motor controller are you using and what esc type is selected in the parametes? I had the same issue with a rover build and found I had the esc type parameter set to bipolar and when I switched to normal all was good
Hi Leonard, thanks for the reply!!!
The motors have a build in controller as i understand (https://www.aliexpress.com/item/32842259866.html?spm=a2g0s.9042311.0.0.27424c4do5KU6o).
The connections are documented as:
Red: Power+ (Power from battery, not the servo rail)
Black: GND
White: direction (relay)
Yellow: Encoder signal
Blue: PWM/Analog speed control.
I set the MOT_PWM_TYPE to “BrushedWithRelay”. I connected the White line (Direction) to the Relay pin of the ardupilot.
I tried “Normal” and the motor keeps constantly turning and in this way i can not even control the direction of the rotation. With BrushedWithRelay i can change the direction but i can not control the speed or make the motor stop turning (keeps turning constantly)
All big brothers, would you please share some picture that how to do the wiring and the setup on the mission planner, thanks ![]()
Hello
the reason why your engines keep turning when you dont apply any power to it, is because you need to set the min/max/dead zone values correctly. You can do that in RC1 and RC3 if you use the MAIN 1 and 3 for throttle left and throttle right. Just have the engines running and test the normal values (should be around 1500).