Is it necessary to enable both filters (HNTCH and HNTC2) so that each motor has an individual filter assigned? Or is this configured from INS_HNTCH_OPTS (perhaps 1 or 2)? Reading the documentation I wan not able to clarify this.
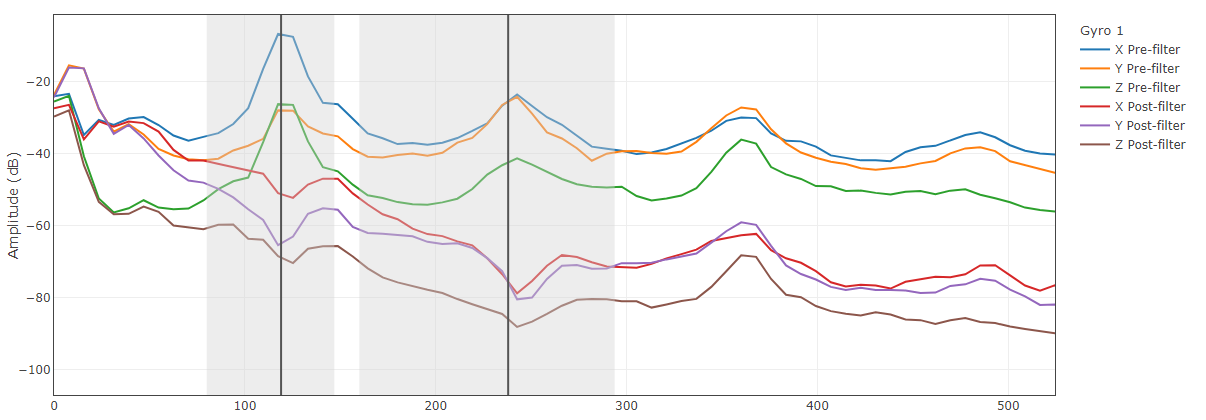
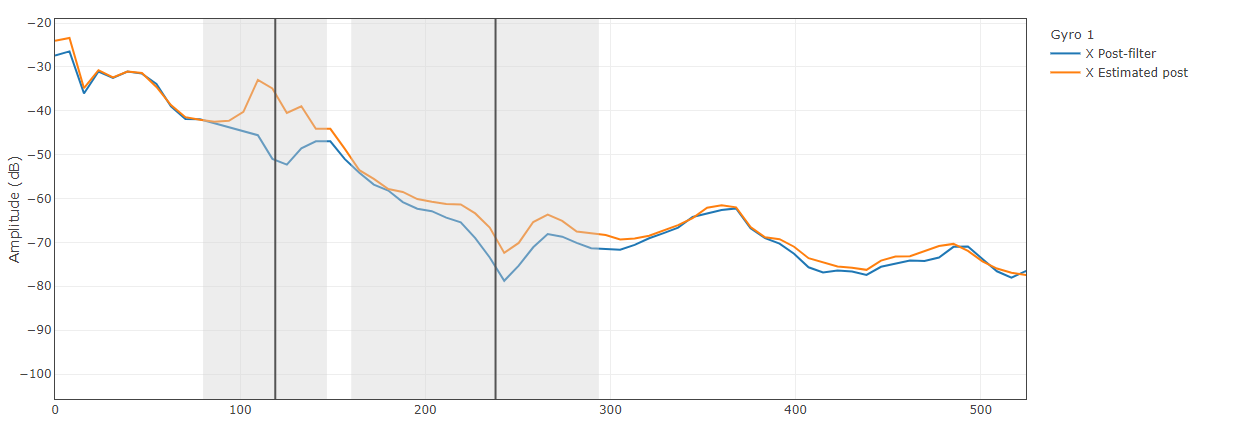
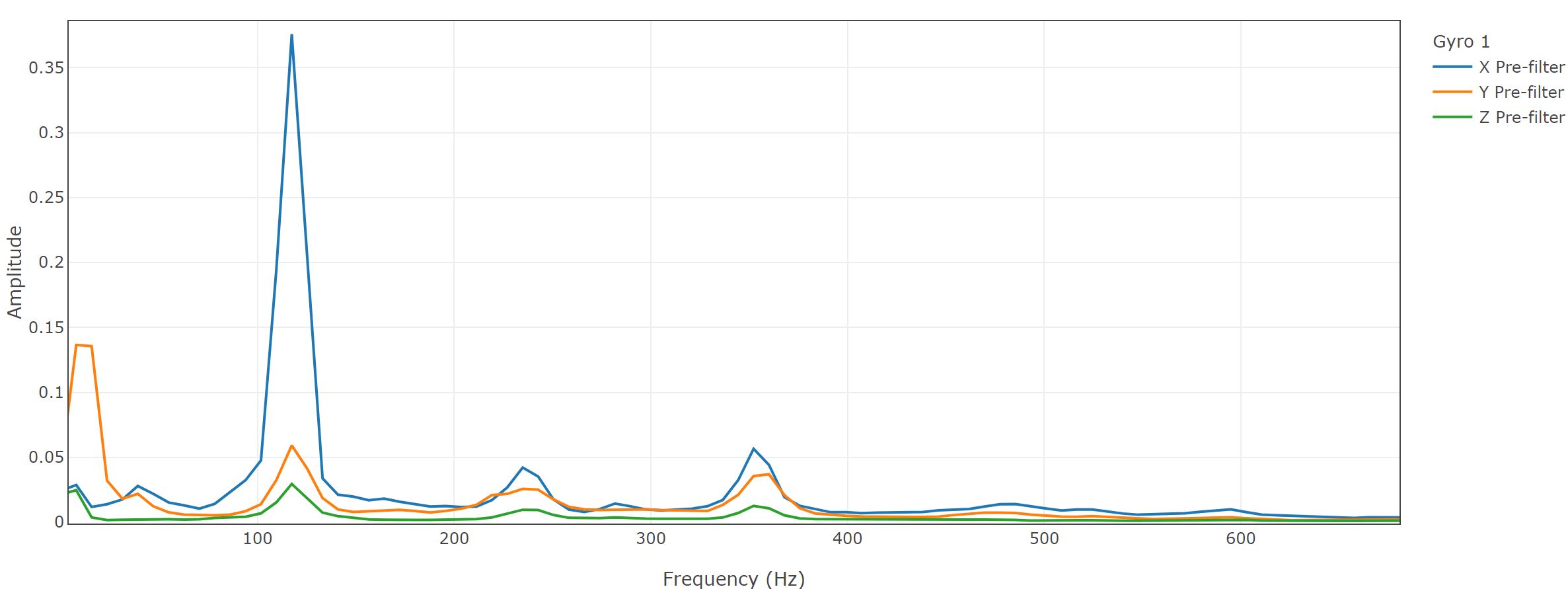
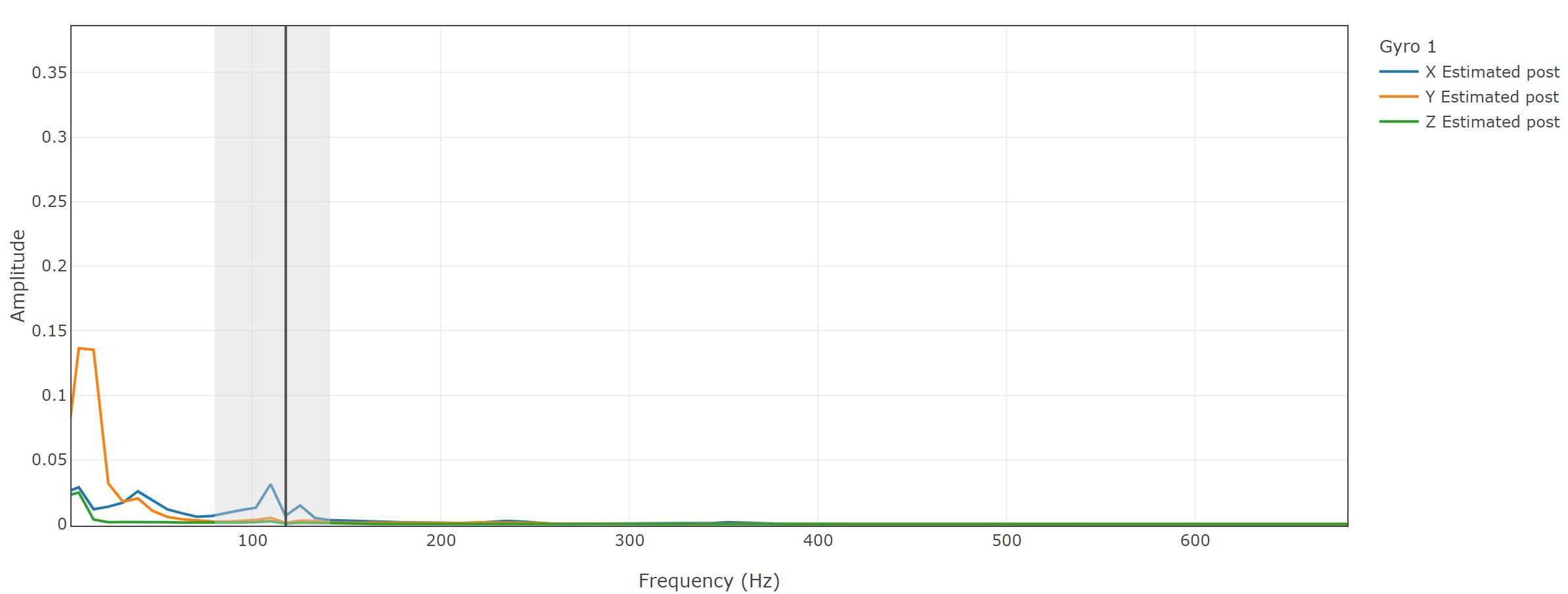
In the picture above it is obvious that the noise is better after the filters but I can not tell for sure what is the the main frequency and the harmonics of the noise from the motors.
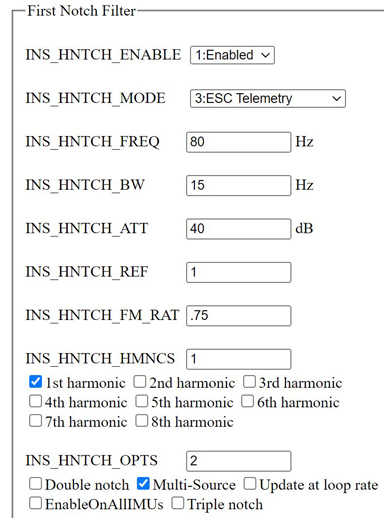
INS_HNTCH_FREQ: Harmonic Notch Filter base frequency
Note: This parameter is for advanced users
Harmonic Notch Filter base center frequency in Hz. This is the center frequency for static notches, the center frequency for Throttle based notches at the reference thrust value, and the minimum limit of center frequency variation for all other notch types. This should always be set lower than half the backend gyro rate (which is typically 1Khz).
However, I am a bit confused about the INS_HNTCH_OPTS and INS_HNTCH_BW selection though. The flight was done with 1 and 40 accordingly. Reading the documentation it makes more sense to use INS_HNTCH_OPTS = 2 (a notch per motor; my platform has 2 motors). Bidirectional Dshort with Dynamic Harmonic Notch Filters - #2 by xfacta here is stated that when setting OPTS to 2 one should lower the BW to 20.
Does this make sense? If I do this (BW = 20, OPTS = 2) the filter response is worse than the existing one.
Finally, if I choose INS_HNTCH_OPTS = 2 does that mean that there will be two overlapping notches? Assuming that motor speeds are close enough. Can this impose issues in the controller?