I stop at " 5.1Channel Configuration" because I have a wing, not a plane…
How I setup it ?
I try to change :
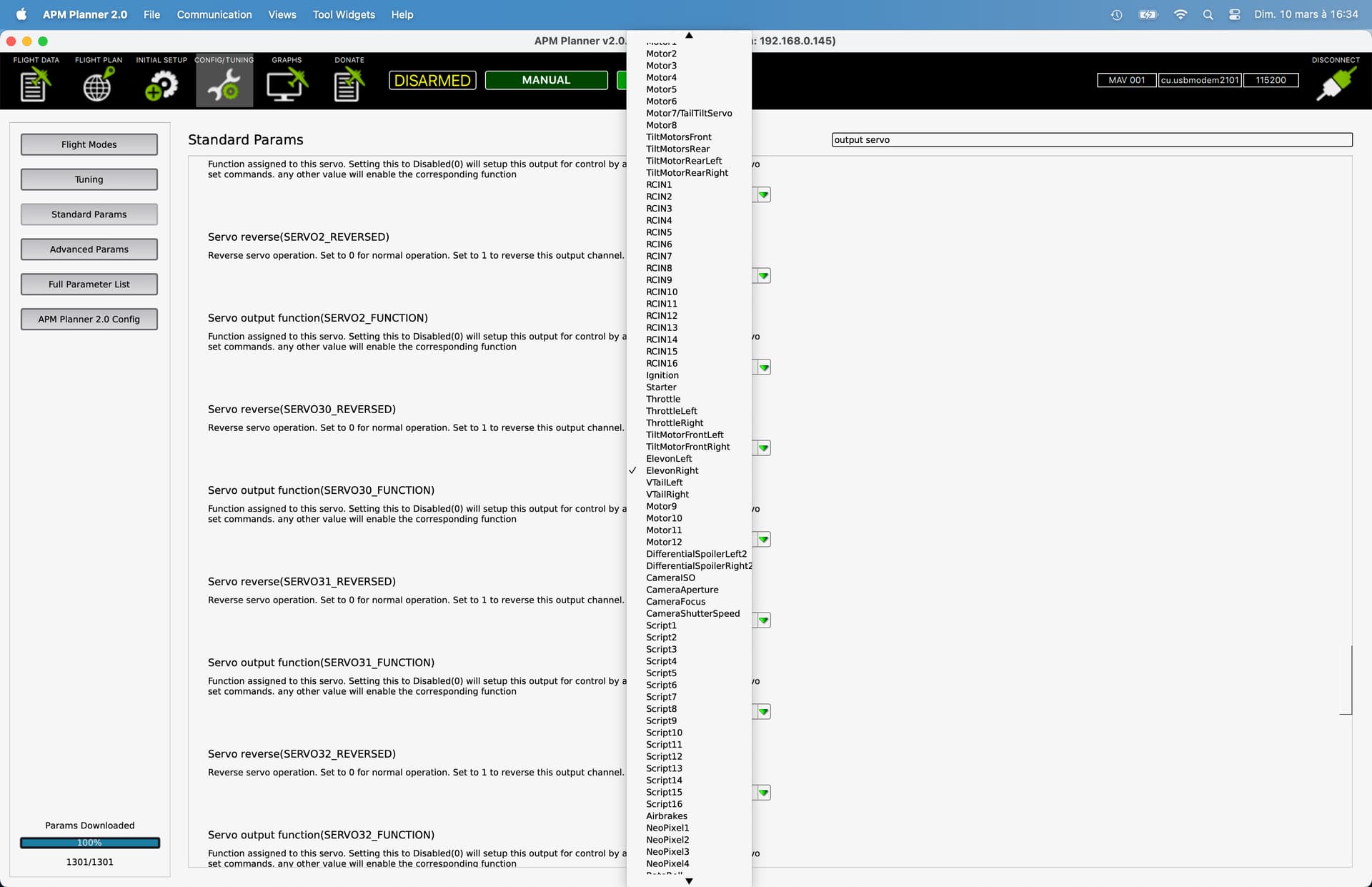
SERVO1_FUNCTION Left elevon ( before Elevator )
SERVO2_FUNCTION Right elevon ( before aileron )
SERVO3_FUNCTION Disable ( before aileron )
Now you startet the Thread as before. Did you checked @Janno answer?
What is a diffrence between a wing and plane?
A flying wing a just a special kind of a plane in my eyes.
Why you look to instruction which is not directly supported by ardupilot. Your link goes to speedybee but not to ardupilot. So this information might be not always up to date.
Also in Ardupilot you can find many basic setup and tunig guides
For example https://ardupilot.org/plane/docs/quadplane-support.html
And, no, I have no experience with any type of quadplanes and any specific ardupilot questions. I only can help by some general logical questions to bring you on the right pass.
Unfortunately (for Damienv), this SpeedyBee doc is up to date. His APM Planner 2.0 (Mission Planner replacement for Mac OS) just isn’t really comparable to Mission Planner on Windows.
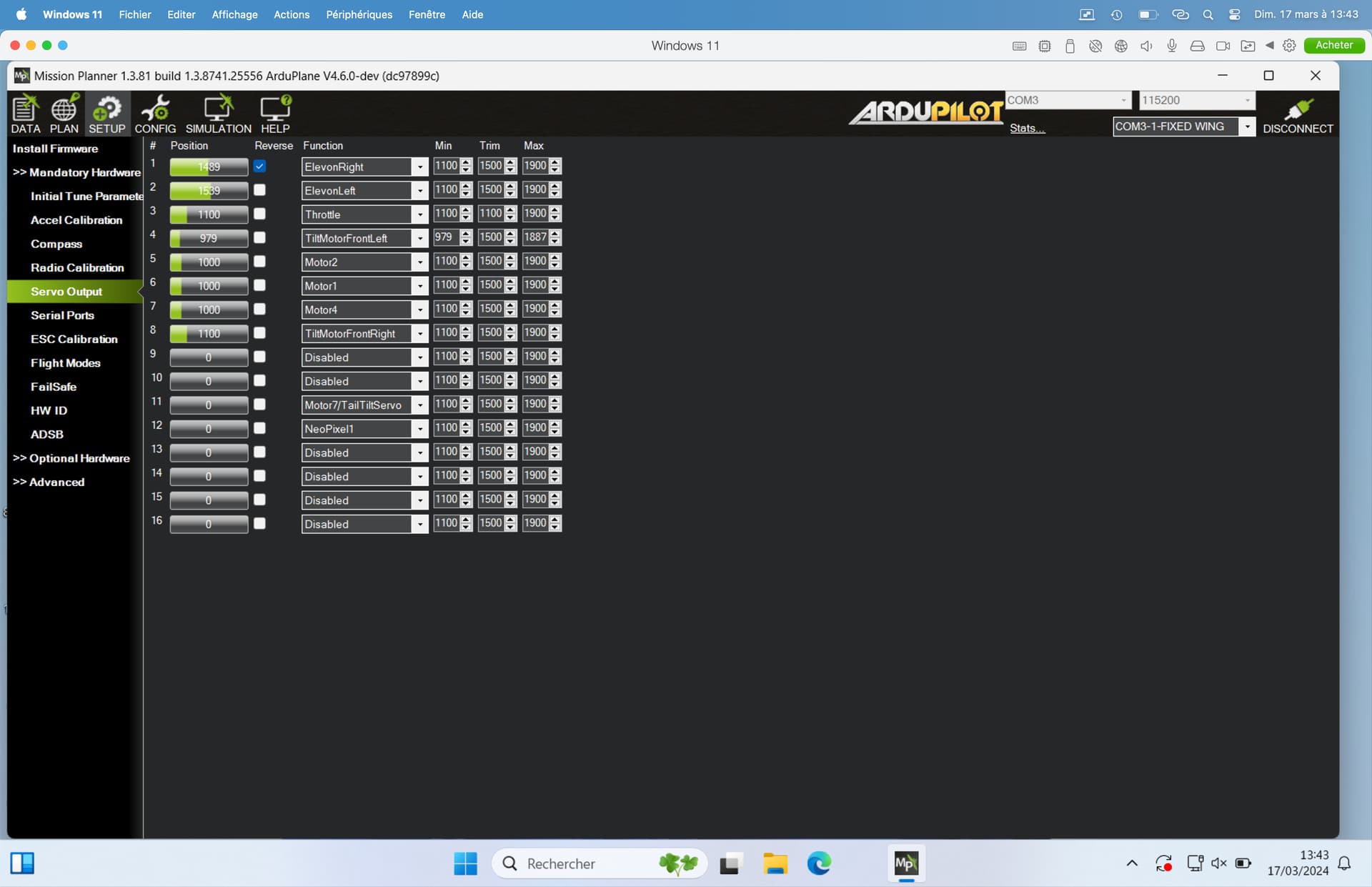
Yes and no. On PC it would look exactly like in the SpeedyBee doc. However even on Mac with the APM Planner 2.0 the FC should be fully configureable, albeit with less GUI and more raw parameter editing.
I installed window, the interface is better.
But nothing changes my problem…
How to configure a flying wing? The mixing?
And continue with the rest of the settings? Because I’m stuck.
A video with screen sharing?
Maybe this helps: Elevon Planes — Plane documentation
You don’t have to mix anything by hand, the moment you select “Elevon left/right” all the mixing is done in the background by ArduPilot (simplified).
The Topic is amazing… if you go a right it’s the right…
There is nothing !
I did a reverse and swapped outputs so that it was in the right steering direction… now it is no longer the right direction for the stab!! one of the fins has more travel, but on the exits it is identical. Nobody knows how to adjust a wing here?? or did a Vtol??
Please define “There” and what you expected to find, of which nothing was “there”.
Swapping outputs is rarely a good idea. The servo on the “elevon right” output has to be the servo that controls the right elevon.
That’s why swapping outputs isn’t a good idea.
What exactly is a “stab”?
Fins? I thought you had a flying wing with elevons and fixed winglets on the tip of the wings…
Wrong. But when it is harder to understand the problem than to fix the problem, most people here just can’t be bothered. Lots of people have build flying wings, VTOLs and also flying wing VTOLs, there is enough documentation that it shouldn’t be a problem, including elevon mixing, servo setup, etc.
We can explain it to you and point you to the documentation, but we can not understand it for you.