Hi All,
I recently encountered a problem that has me a little puzzled and I am hoping someone can help me figure out the cause. a few days ago I was adding the finishing touches on my new build and wanted to ensure that battery failsafe was configured correctly. I am using a 3rd party current sensor so I began the process of making sure it was tuned properly. I set the voltage and the current according to my watt meter and everything was running smooth. I decided to test and make sure the FAILSAFE_BATT worked as expected. I was doing the endurance test inside a warehouse as the weather was bad outside. My copter did not have a GPS installed and I was hovering in AltHold the entire time. The failsafe was configured to LND when it either hit 22.0v or 500mAh reserve, the battery is a 6s 8A. Upon hitting FAILSAFE_BATT-1 the copter appeared to start descending about a foot before going full throttle and slamming into the ceiling 15ft up then smashing into the concrete floor, I was hovering about 5ft when the failsafe activated. The battery did not sustain any damage from the impact, I charged it back up and 7200mAh was put back. I was watching the HUD on MissionPlanner and the voltage was about 22.3v when failsafe activated. I cant seem the figure out why it would shoot up. Maybe there is a setting flipped that I have overlooked, but AltHold works really well so I assume PixHawk knows how to climb and decent? I’m hoping someone can take a look at the Log from the flight and help me figure out how to prevent this from happening again.
Addition information:
PixHawk is flipped 180 and AHRS has been adjusted.
The TX used has a spring to center throttle. (works well for AltHold)
Firmware: Copter 3.4.6 X8 configuration
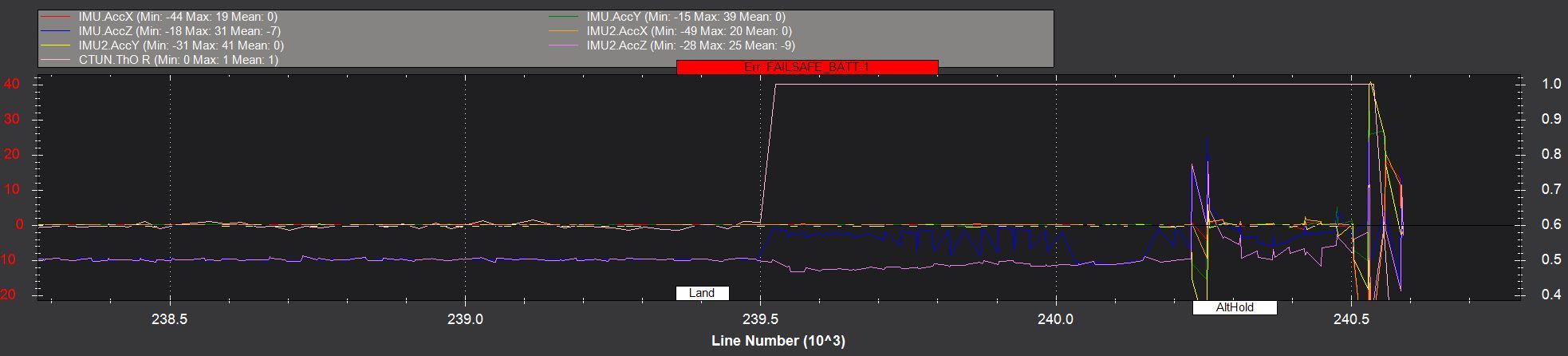
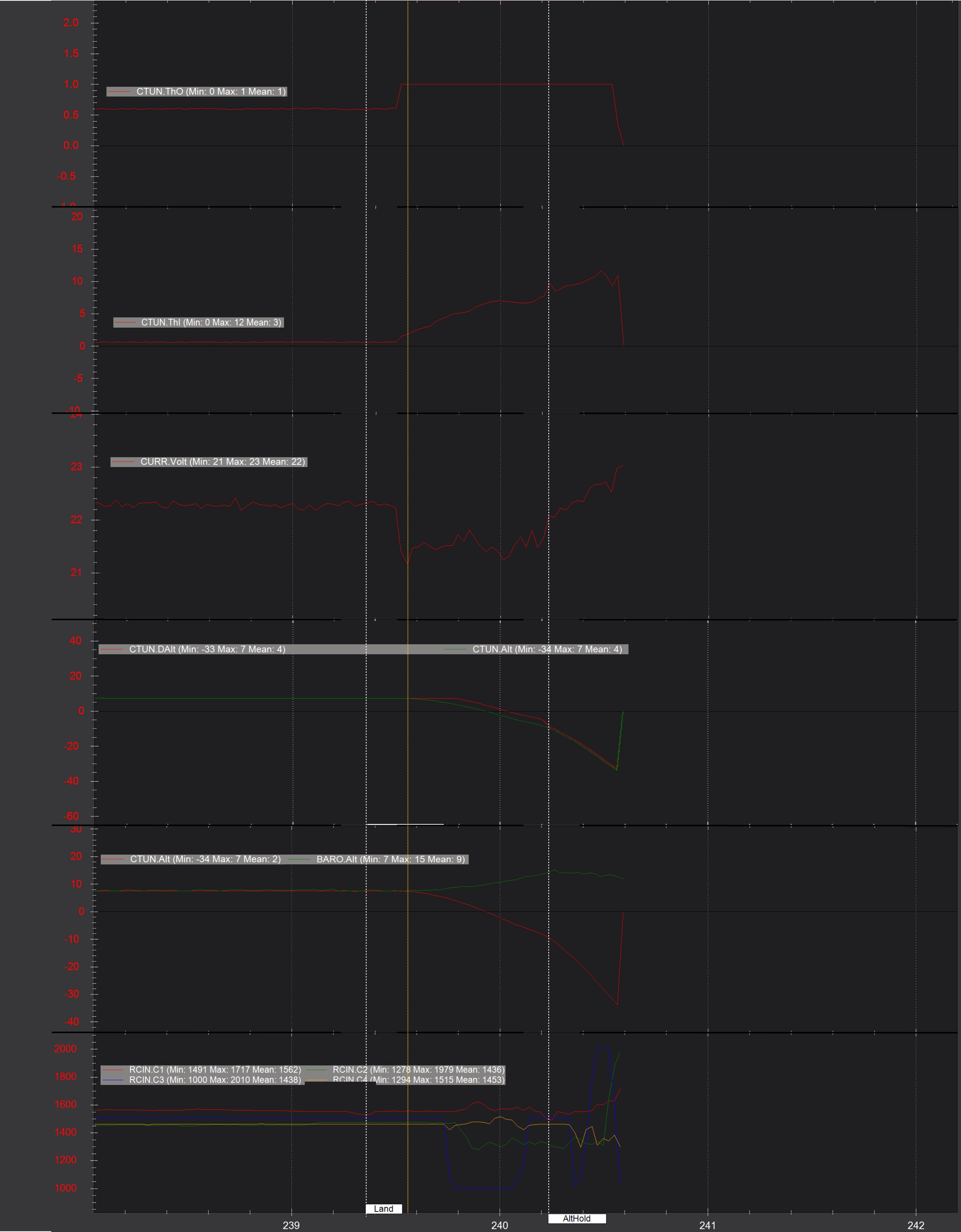
You can see right after failsafe was triggered the vehicle began to climb, then the user pulled down on the throttle (RC3) to stop it from continuing the climb (without success). When you see the mode switch back to ALT that was because we cycled the mode switch to try and get the quad under control again. Not sure if we were able to establish any control because at this point it had already made contact with the ceiling. The full throttle you see on the input (RC3) was because the quad started to fall from the impact with the ceiling (natural reaction).
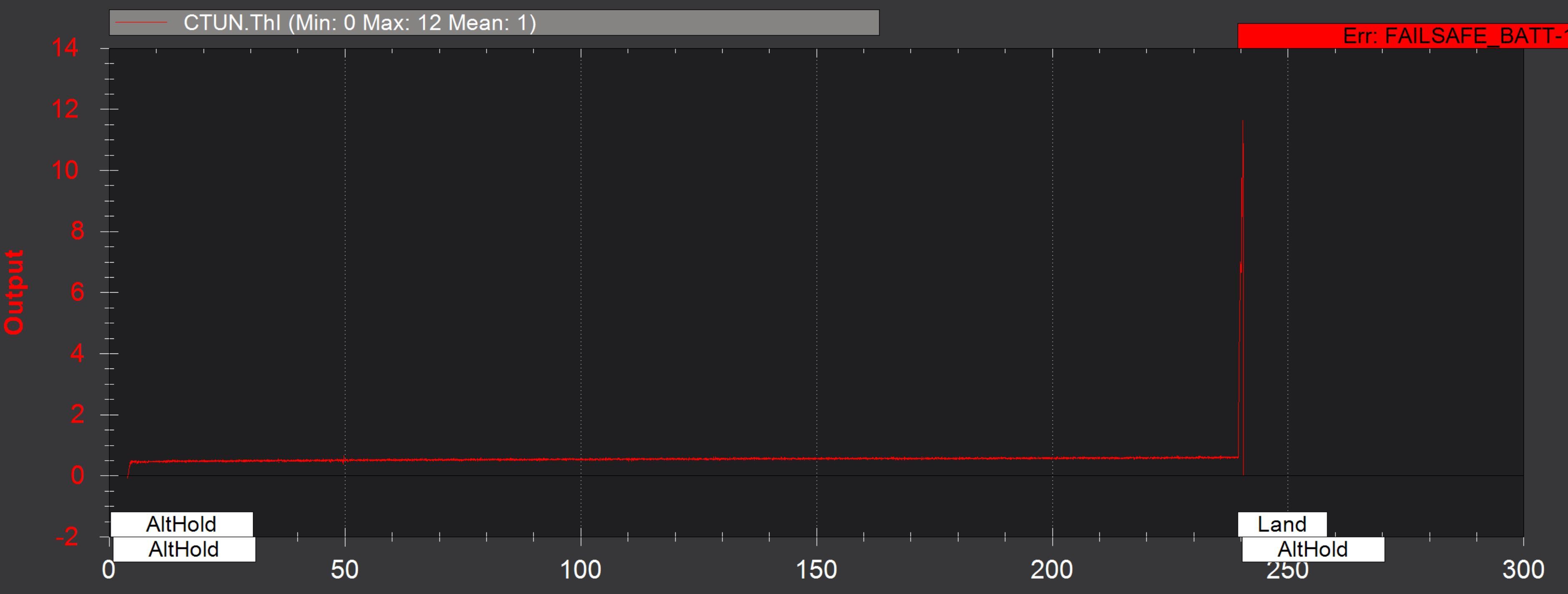
The thing that really has me confused is why ThI (Throttle In) goes crazy when failsafe gets activated which in tern causes the ThO (Throttle Out) to go max 100% you can see this on the other graphics attached, the ThI was smooth the entire flight until FailSafe activated why would RC3 (throttle) input read smooth and accurate but ThI (Throttle In) go sporadic? In the documentation for reading the log files it states “The pilot’s throttle in as a number from 0 to 1000” but it clearly went to 12 on the graph, does that mean it was seeing a value of 12000?
Is there potentially a value switched that would cause it to accelerate up instead of establishing a decent? when you graph CTUN.Alt and BARO.Alt, both match the entire flight until FailSafe activates, then the CTUN.Alt goes opposite of the BARO.Alt. Is that normal?
I should hopefully have things repaired pretty soon and would like to get this figured out, both for me and maybe someone else that might have experienced the same thing.
Potential troubleshooting steps:
-
Set a mode to: LND and make sure it works properly, allowing me to switch back if it doesn’t.
-
Roll back to a previous firmware and see if there is any change.
I am not sure how repeatable the problem is and do not plan on sending it back into the ceiling again. Ill need to figure out a way to anchor the quad and make sure the FailSafe behaves as planned.
I started a post over on DIYDrones with no luck and hopefully someone here has encountered this problem and can help.

Flight Log: https://drive.google.com/file/d/0B15aUn3vB-goQXZIR1VnZklBNnc/view