Everything was going very well, the plane was flying smoothly in AUTO mode. However, during the descent, a few waypoints before landing, it deviated significantly from its course and fell several meters away.
We have a Pixhawk Cube Orange and a dual Here3 GPS module. The aircraft also has a Lidar and a pitot tube.
The log of the flight is here. (After the main flight, nonsense data came, as the GPS data deviated excessively. You can reference the Throttle data to understand when it flew and crashed.)
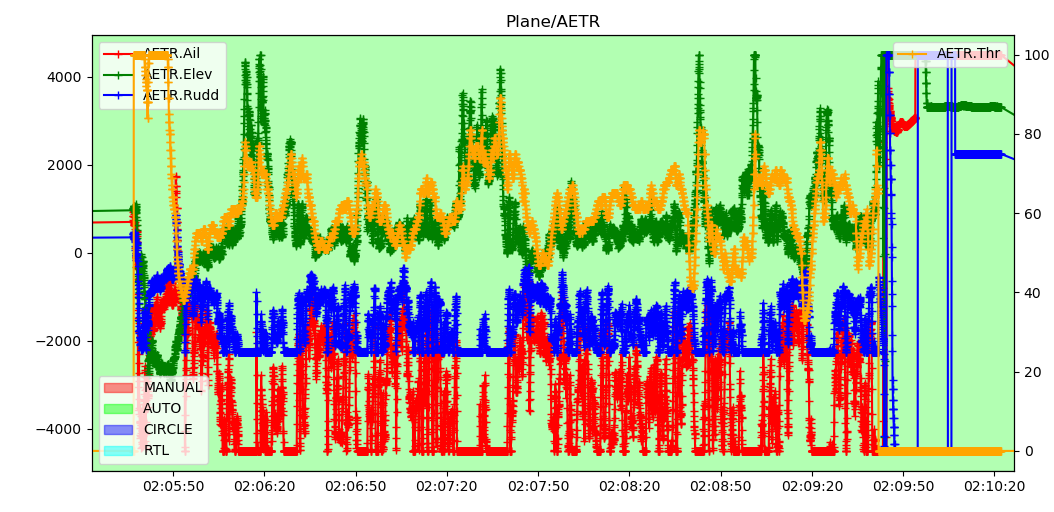
The aileron is severely out of trim, with maximum left aileron used in a lot of the flight. The aircraft either has a severe left/right imbalance or the control surfaces are very badly trimmed. ArduPilot did it’s best to try to control the aircraft, but lost control at the end.
These were the control outputs:
tridge, thank you very much for your reply. There is only one aileron channel on the plane, they are not separate as right and left. One servo is normally connected to this channel, while the other is reverse connected to this channel. Ailerons work against each other. Could this be the cause of the situation in the chart?
We looked at the plane and found slight mismatch in the ailerons.
In addition, what can we do to increase stability and especially to follow waypoints better and fly closer to waypoints, what are your recommendations?
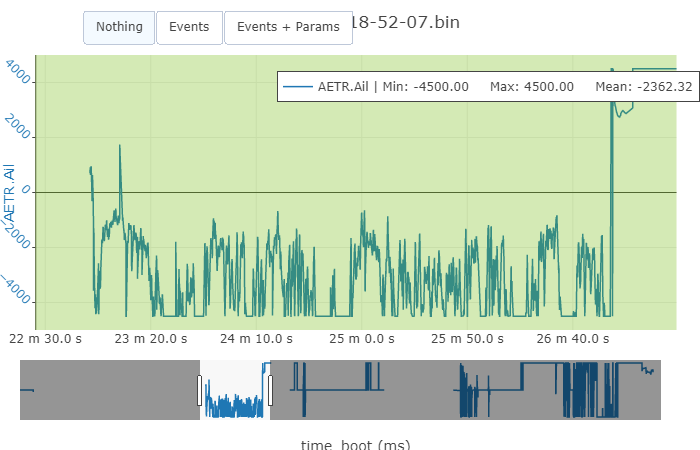
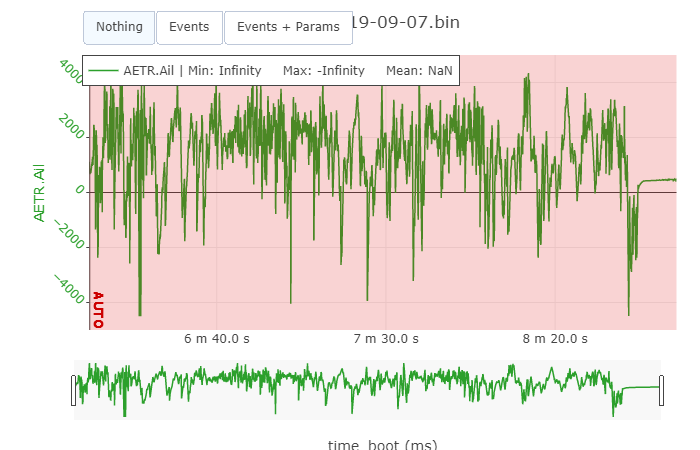
I compared the data of this flight with another flight I took a week ago at the same place, which went well. I think the negative side is right aileron (or at least the plane is turning right on the negative side.)