I tried the Loiter and Pos Hold today, it did fairly well…
In loiter mode, when given stick inputs it was very sluggish and in pos hold mode when given stick input it was as responsive as flying in stabilized mode.
So my question is which mode should be used when we need gps as in when stock neutral the vehicle should hover in the same place and when given input it should fly around?
Ofcourse for landing I switched to stabilized mode and landed.
Still not figured out how to upload my log file here, will upload once done.
Thanks.
I prefer Pos Hold as it’s more flyable than Loiter for an augmented flight mode. I modify the braking settings for Pos Hold so it only goes 8 degrees nose up with 4 deg/sec transition, which makes it super-smooth coming to a stop out of high speed flight. If I’m flying waypoints I’ll flip it into Pos Hold before it comes to the final waypoint so it stops smoothly. Otherwise it’s quite rough.
There is a limit for the file size on the forum, so it’s way better if you upload the log to one of the cloud services, like Dropbox, Onedrive, Google drive, etc. and share only the link to it here.
Thanks Chris Olson and Bill Geyer.
Flew a small auto mission today. Did an auto take off and 5 waypoints and auto land. It did fine. But during the mission, there was few error messages like “Error Compass Variance” and “Bad Gyro Health” and “EKF” is flashing Red. “EKF Error switching tio Compass One” Is there something i should do about it? Please advice.
Please see below the link of my today’s Auto mission log file (Thanks Igor Ivanovic)
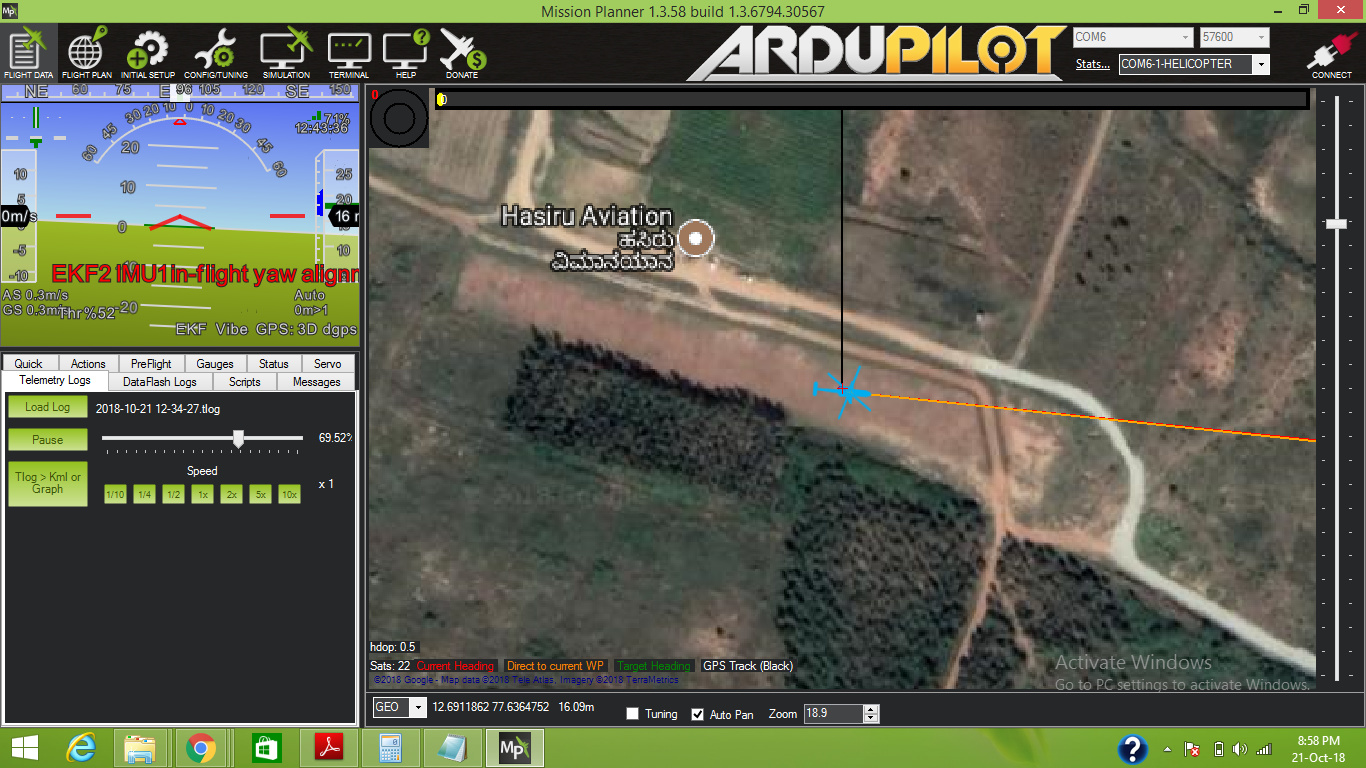
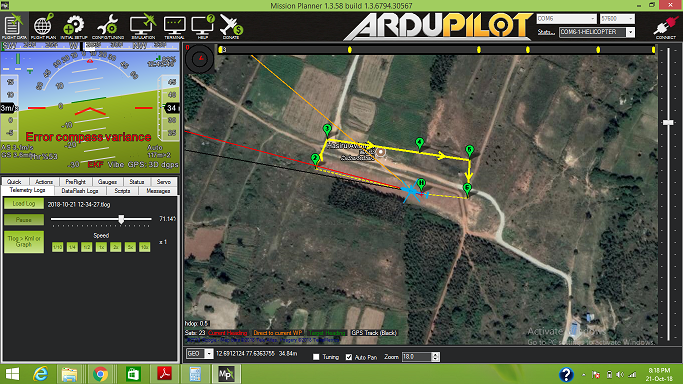
Also, please see few screen shots of the errors during the auto flight in MP. This was taken when replying the mission by telemetry logs in mission planner. Is there anything seriously wrong that i should stop flying this machine untill i set it right? Whats to be done Please?
Here, error compass variance error came in when was from soon after take off and after attaining target altitude and was there till it reached waypoint 2.
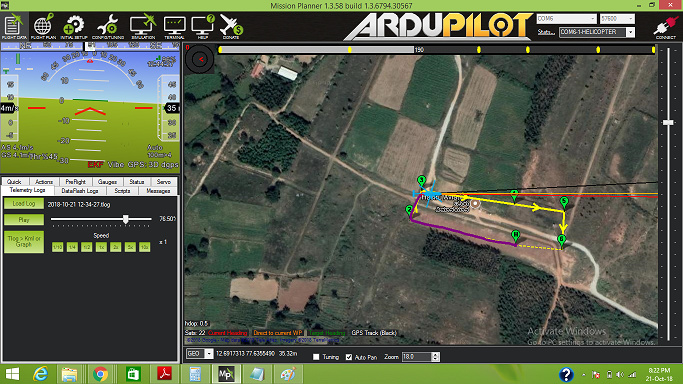
And here below, the error was there during waypoint 3 all the way to 4.
Most of us are flying with compass 2 and 3 turned off. typically you can’t rely on the compasses on the controller because they are too close to interference. Just use the compass from the GPS which is typically compass 1. So set
COMPASS_USE2 =0
COMPASS_USE3 =0
Thank you Bill Geyer, will set those for the GPS.
In one of the threads I also read that it’s advisable to change the Ek2 Imu mask to 1 for Gps used modes. Should I do this too?
By doing this does it mean, the ph will use only one imu?
Will the i gain matter in forward flight too or only in hover? I think my i gain is .22 and ilmi is .5. Can this ilmi be increased for better tracking while on forward flight? if you see the screen shot, the heli flies a bit croocked from one wp to another.
Ofcourse, as of now, i’m using an external gyro on it, will get to remove it and hook the tail servo to the ph directly.
Yes I would set EK2_IMUMASK = 1
The I gain does work in forward flight but it’s max integrator is set my the IMAX param whereas for hover the max integrator is set by ILMI. Your value for ILMI is too high. It should not be greater than 0.1. The IMAX value could be as much as 0.5.