OK, it’s underpowered/overweight and you have a mechanical Yaw bias. some motors are at Max with the average PWM output ~1800us. Hence the Thrust Loss messages.
hi @dkemxr i agree may be its underpowered as i am using 6s 16000 mah battery
can you tell me the main reason for mechanical yaw bias, is that due to structure related issues like twisting arm or motor level ?
i can see the vibes are decent and even the motors are levelled properly
so what do you think the reason might be ?
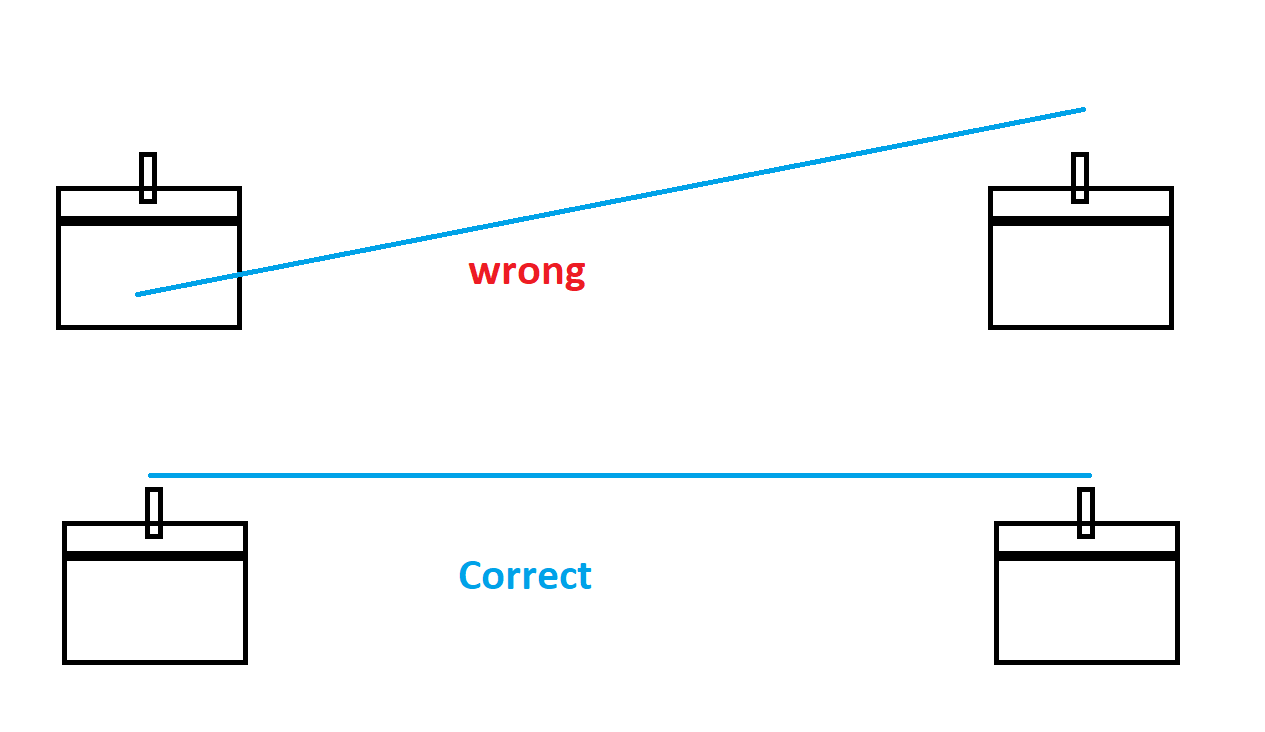
A. If your boom to frame holders are level (no dihedral), you can place your drone upside down, with the motor faces touching flat on 4 even surfaces with the bolts of the X6 loose. Once all faces touch evenly then you tight the mount screws
B. If your booms have dihedral.
1. You mount all the props
2. place them perpendicular to the Arm/Boom
3. Close one eye and place the other aligned looking through the prop mount to the distant prop mount and start moving backwords until
4. You can see the Tip of each close blade "touching the prop mount center of the other two motors.