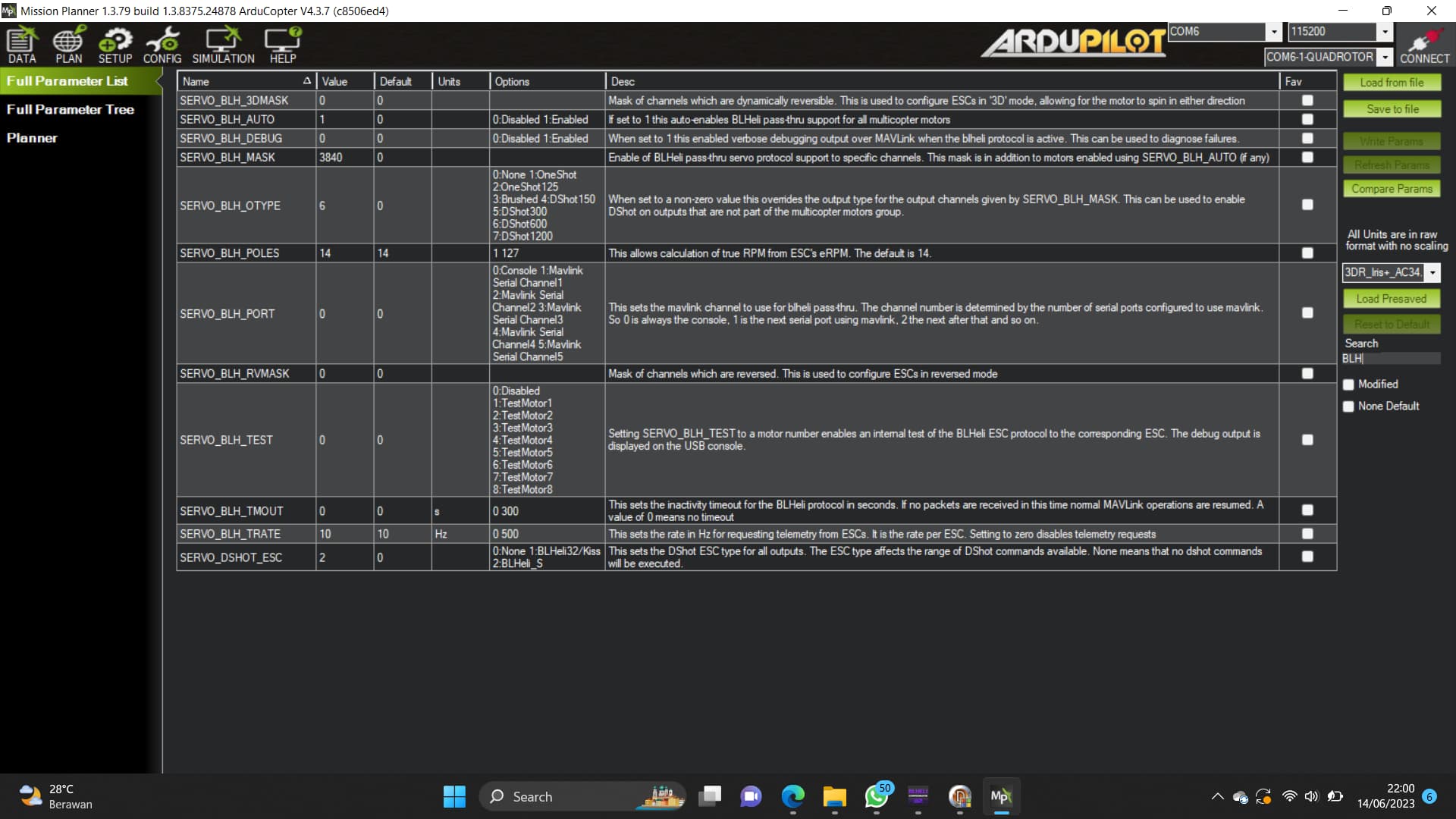
I have set these parameters according to all the references I got about BLHeli. However, why is the motorbike that I use still not comfortable to use? In fact, I have turned off the brake on stop, but when the motor is scanned, it still brakes on stop.
The motor will appear to brake when throttle is reduced but that’s just a bit of regenerative braking - it’s not a hard brake to forcibly stop the motor. If you enabled Brake On Stop there is a significant difference.
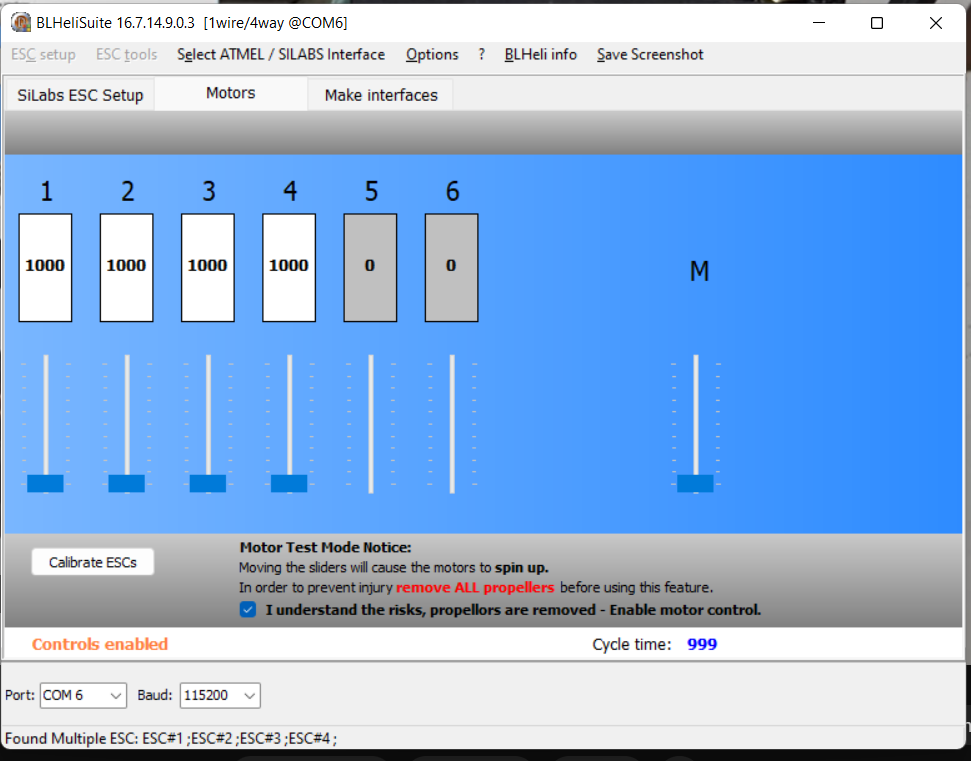
Only use MissionPlanner motor test
I have previously used that blheli motor test (with sliders) but it didnt always work, and now later versions of BLHELIsuite dont even have the motor test anymore.