Hello!
I have some issues with my quad. Im using 6Ah 4s battery with 12’’ props and sunnysky 650KV motors, the weight is around 1.5kg and running arducopter 4.0.7
I can take off with a full battery and everything is fine and dandy, the PID tuning might not be the best but i get it airborn and it is hovering well in poshold. But the issues start when the battery reaches around 14.3v. once it reaches that voltage range, it turns 90 degrees and starts toilet bowling or starts to loose altitude. And after that has happened i am unable to fly the quad again. In stabilize mode it takes around 80% of thr input from the remote compared to around 40% before. when i replace the battery, it happens again around 14v-s. It does not matter if i take out the battery and replace it with another used battery. It always happens around the same voltage mark. Can you maybe see something from the log?
Without taking a look at your log because I am reading from my mobile, the question comes up in my mind, if you disabled the low power cutoff in the ESC’s.
This feature should always be disabled for Multirotor applications.
I would say it’s best to disable those for all Multirotor applications. And relative to a 650kV motor for sure you would want Low RPM Power Protect off.
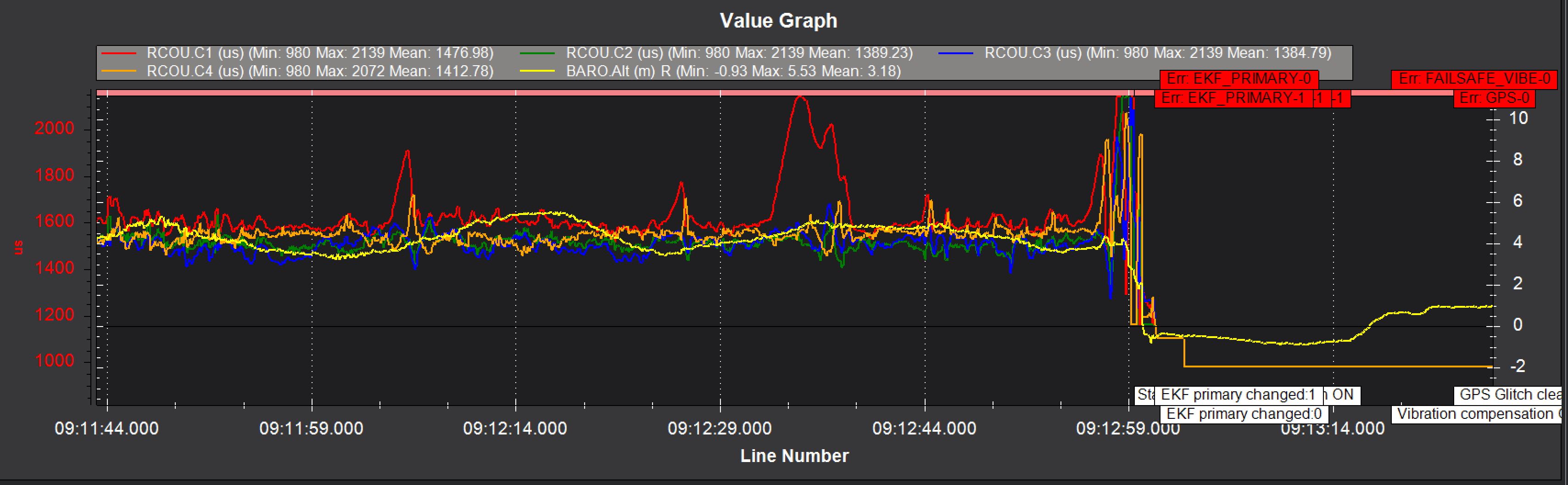
I’m not seeing anything real definitive but something is going on with ESC/Motor 1. Commanded output starts to spike around the voltage level you identify and then get’s worse. Usually this will happen with a loss of thrust but when that happens the opposite motor (#2 in this case) would drop to compensate. That’s not happening here. So, not sure.
Other observations. You are running on default parameters w/o setting the Initial Tuning Parameters.
Why are you using Quad V? In my experience even if it’s a Dead Cat style frame Quad X will perform better. But I doubt this is the problem.