After an extremely helpful link to https://plot.ardupilot.org by amilcarlucas, I was able to analyze my logs from my previous thread. Build specs are in that thread.
I think, and this is where I need help confirming, that compass disruption of some sort caused my quad to begin to yaw crazily and begin to lose control.
Of course, this happens right as low battery fail-safe kicks in with RTL. Are they related?
Any help and guidance is greatly appreciated!
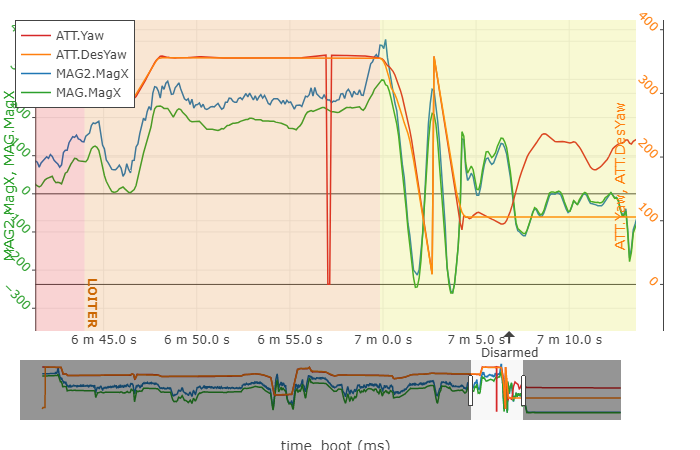
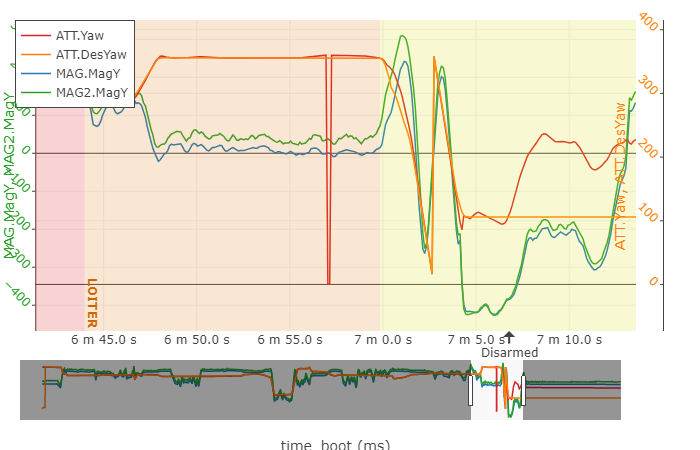
MAGx and MAG2x (notice the quick sharp dip in ATT.Yaw… I’m stumped. The quad didn’t actually yaw at that point):
Glitches in compass or GPS wont usually cause uncontrolled yaw and loss of control - you’d see a constant deviation with a MagX/Y/Z and probably your yaw would be off some number of degrees.
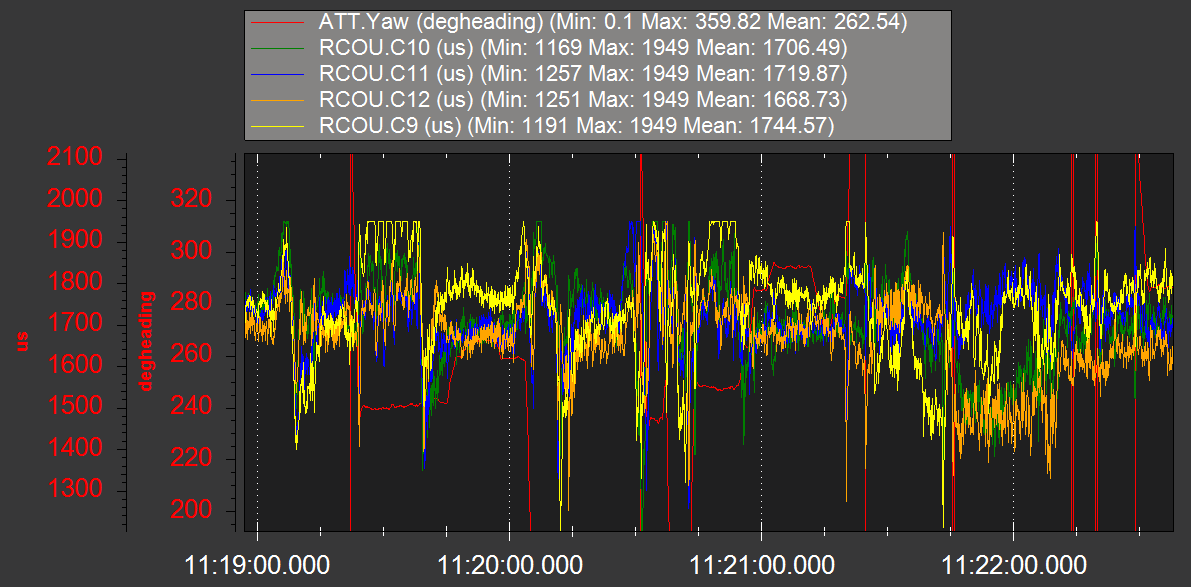
The real problem appears to be your motors are running at near maximum - this is not leaving enough headroom for proper yaw control (I believe). See in this graph every time there’s a “problem” with yaw, your motors, especially RC9, are going to maximum. Arms or motor mounts might be a bit twisted too, see if you can get all the props perfectly aligned in a nice flat plane.
Thank you for the info! After some further searching online, I sort of came to the same conclusion about the motors being maxed out.
I very carefully leveled the motors and arms during the build, and they do not move or flex. Vibrations are at very acceptable levels, too.
I think this frame/motor/prop combination is not going to allow for much payload… Even with 4s. And that’s fine. It is learning platform for me until I build one for more flight time and payload.