I´m not able to find the causes of this particular crash. It is a Quadcopter with 25Kg, Cube Black and 2 HERE2 serial GPS. Has a radar for height control (crop sprayer quadcopter). The copter went crazy in the moment when changed from LOITER to AUTO. I´m not sure if he flipped over before hitting the ground. The same copter made may flights before with no problems. We are having issues with Compass in Brazil due our week magnetic field (South Atlantic Anomaly). Boths GPSs are mounted outside the UAV in order to minimize interference.
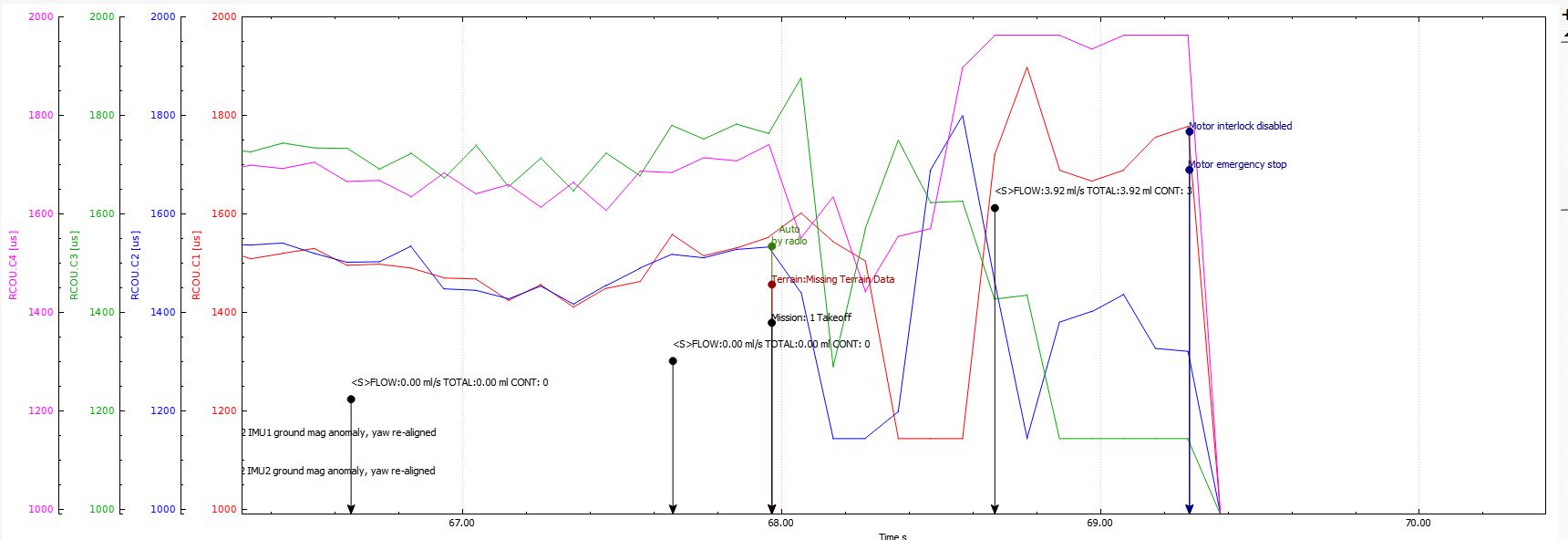
But the result was the right side motors were commanded to ~max, left side dropped to compensate. I suppose as @xfacta suggested because you have a rather large mechanical Yaw bias it leaves less authority for stabilization:
This particular crash is puzzling my mind (we have about 30 similar units flying). Could there be a monster coincidence that one of the propellers broke exactly at the AUTO switch time and made this tunneau roll ? It was flying OK in LOITER. I also noticed a GPS 2 set as primary near the AUTO event. What could this matter if GPS 1 and 2 are set to GPS_AUTO_SWITCH,2?
I will have to study to understand the yaw bias problem you pointed out. I was not aware of this possibility. On all copters with similar configuration I just used Autotune with 0.75 Aggressiveness with empty tank (copter about 15kg) and so far is working fine.
We operate in Brazil with crop sprayer UAVs whos firmware was updated to accomplish specific crop spraying tasks and updating Radar drivers. We made our own ground station specific to crop spraying market. This specific problem unit still used Cube Black but the new Pelicano 2021 product line uses Cube Orange and HERE3 GPS.
This is usually a mechanical problem from Motor mount/arm twist or frame distortion. It’s often seen on craft with round arms.
I recall seeing a post a couple months ago about the prop adapters failing on that motor/prop power system. Or maybe it was the fasteners, I don’t recall. It seems to me that @Corrado_Steri reported that.
I still wonder what was driving the large Roll command. What was broken when you recovered the craft? Of course this can be misleading as it could have broken upon impact.
Got, it, thanks for the explanation.
Edit: Here is the link about the prop adapter screw failure:
Today a brand new 25kg Hexacopter (Cube Black on 4.0.5.) had a very similar behavior. Is there a way to check if a ESC has failed? On time 13.28.2 was a “Potential Thrust Loss” and a very strong Roll left. All propellers and motors were OK after the crash. Nothing was broken… I´ll check tomorrow the hardware.